Présentation du PPE - PPE : Boy de Volet

TPE TS4
JEGOU – SIMONITTI – CAZENAVE
Motorisation
Boy de Volet
Date : 25/04/06
-----------------------------------------------------------------------------------------------------------------
Page : 1 / 25
SIMONITTI Yann TS4 SI
CAZENAVE Maxime
JEGOU Thomas
PPE
Boy de Volet
Sujet : Proposer une adaptation du système
permettant de commander électriquement
l’ouverture et la fermeture du volet.
Rapport, photos et vidéos disponibles sur le site Internet :
http://ppe.volet.free.fr/

TPE TS4
JEGOU – SIMONITTI – CAZENAVE
Motorisation
Boy de Volet
Date : 25/04/06
-----------------------------------------------------------------------------------------------------------------
Page : 2 / 25
SOMMAIRE
1. PRESENTATION DU PPE _______________________________________________ 3
1.1. Expression du besoin ________________________________________________ 3
1.2. Approche choisie du problème ________________________________________ 3
1.3. Les Contraintes ____________________________________________________ 3
2. STRUCTURE DU BOY DE VOLET ________________________________________ 4
1.4. Partie Mécanique du système _________________________________________ 4
1.4.1. Dimensionnement _______________________________________________ 4
1.4.2. La maquette ____________________________________________________ 5
1.4.3. Différences maquette/industrie _____________________________________ 7
1.5. Partie puissance (commande du moteur) _______________________________ 8
1.5.1. Développement _________________________________________________ 8
1.5.2. Fonctionnement de la maquette ____________________________________ 11
1.5.3. Les différences entre la maquette et un projet industriel ________________ 13
1.6. Partie électronique (sécurité moteur) _________________________________ 14
1.6.1. Développement théorique ________________________________________ 14
1.6.2. Fonctionnement industriel ________________________________________ 15
2. MISE AU POINT DE LA MAQUETTE ____________________________________ 19
2.1. La fabrication de la maquette _______________________________________ 19
CONCLUSION ____________________________________________________________ 22
2.2. Résultats obtenus __________________________________________________ 22
2.3. Facilités rencontrées _______________________________________________ 22
2.4. Difficultés rencontrées _____________________________________________ 22
2.5. Ce que nous améliorerons lors d’un prochain projet ____________________ 23
ANNEXE ________________________________________________________________ 24
2.6. Documents techniques ______________________________________________ 24
2.6.1. Fiche technique du moteur choisi dans le cas industriel _________________ 24
2.6.2. Fiche technique du moteur choisi pour la maquette: ____________________ 25

TPE TS4
JEGOU – SIMONITTI – CAZENAVE
Motorisation
Boy de Volet
Date : 25/04/06
-----------------------------------------------------------------------------------------------------------------
Page : 3 / 25
1. Présentation du PPE
1.1. Expression du besoin
Le problème posé est le suivant : adapter au système du boy de volet, une commande
électrique permettant l’ouverture, la fermeture et l’arrêt du volet, sans avoir à modifier la
position du volet et sans ouvrir les fenêtres.
1.2. Approche choisie du problème
Nous nous sommes rapidement aperçus qu’il fallait diviser notre objectif en sous-objectifs
afin d’aborder plus facilement le problème et se partager les tâches.
Nous avons scindé notre travail en plusieurs étapes qui sont les suivantes :
Recherche rapide de solutions envisageables pour répondre à la problématique.
Etude des solutions trouvées afin de n’en retenir qu’une adaptée à un système
industriel.
Etude précise de la solution pour en dimensionner les divers composants.
Recherche pour l’élaboration d’une maquette à partir de la solution industrielle et
en fonction du matériel à notre disposition.
Réalisation des maquettes (virtuelle et réelle)
Rédaction du compte-rendu du PPE
Nous avons rajouté une option de télécommande au cahier des charges car cette option nous
est apparue comme un plus quant à la crédibilité industrielle du projet.
1.3. Les Contraintes
Le planning imposé était relativement court : 30 heures réparties sur 5 semaines.
Matériellement, nous nous sommes imposés pour la construction de la maquette de ne pas
modifier le système du boy de volet, ni l’axe de sortie du moteur afin de pouvoir réutiliser le
mécanisme déjà disponible au Lycée.
Notre but a été de privilégier l’utilisation de pièces mécaniques disponibles (pour tenir dans le
planning imposé) et d’essayer de réutilisé des systèmes électriques existants (par exemple : la
réalisation de la télécommande).

TPE TS4
JEGOU – SIMONITTI – CAZENAVE
Motorisation
Boy de Volet
Date : 25/04/06
-----------------------------------------------------------------------------------------------------------------
Page : 4 / 25
2. Structure du Boy de Volet
1.4. Partie Mécanique du système
Tout d’abord, nous étudierons dans une première partie, les contraintes auxquelles doivent
répondre les différents composants ; puis, nous verrons les composants sélectionnés pour la
maquette et enfin pour le système industriel.
1.4.1. Dimensionnement
Moteur :
Nous avons commencé par définir le mouvement désiré du volet. Le cahier des charges nous
impose une ouverture du volet en 30 secondes maximum. Nous avons décidé d’une ouverture
en 12 secondes comme dans les systèmes déjà existants.
Le volet doit parcourir 180 degrés.
Il a donc une vitesse de rotation de w=2.5tr/min.
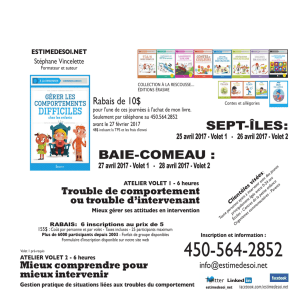
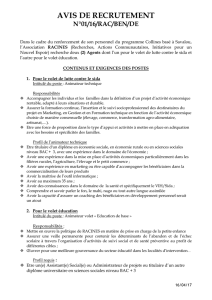
Grâce au logiciel SOLIDWORKS, nous avons pu définir la vitesse de rotation de l’arbre où
nous allons placer le moteur. En faisant une étude cinématique, en pilotant la liaison pivot
bâti/volet, on obtient le résultat suivant : le moto-réducteur devra avoir une vitesse en sortie
de 37,7tr/min.
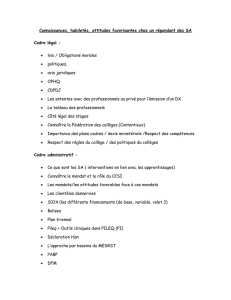
Afin de dimensionner plus précisément le moteur, on fait le bilan des forces appliquées à un
volet (ayant pour dimensions 1390*990mm) :
- Le poids du volet. Cette force ne rentrera cependant pas en compte car elle est
parallèle a la charnière, le moment sera donc théoriquement nul.
- La force du vent s’opposant au mouvement. On considèrera le vent perpendiculaire au
volet. Il existe la relation suivante définissant la force exercée par un fluide sur une
surface : F=(1/2)Cz*d*S*V²
Dans le cas définit précédemment, Cz étant le « profil » de la surface, Cz=1
d, densité de l’air d=1.293kg/m3
S la surface. Ici S=1390*990=1.38m²
V la vitesse du fluide, ici le vent. On prendra V=11.11m/s
On obtient une force F=110.12N
D’après cet effort, on obtient le couple grâce au bras de levier :
Mresist= (longueur du volet/2)*F= 54.5 N.m
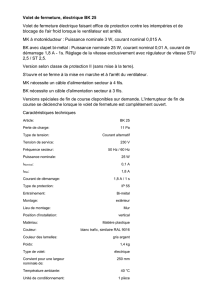
Avec le logiciel SOLIDWORKS, une étude statique nous a permis de définir que le couple
moteur devrait être de 4.5Nm minimum.

TPE TS4
JEGOU – SIMONITTI – CAZENAVE
Motorisation
Boy de Volet
Date : 25/04/06
-----------------------------------------------------------------------------------------------------------------
Page : 5 / 25
On doit donc utiliser un moteur capable de tourner à environs 37.7Tr/min avec un
couple minimum de 4.5Nm.
Les capteurs :
Le but des capteurs est de couper le circuit lorsque le volet arrive en position maximale. Il
faudra donc un capteur de fin d’ouverture et de fin de fermeture. Ils doivent être inverseur :
c’est-à-dire qu’ils doivent s’ouvrir lorsque le volet arrive en contact.
Electriquement, ces capteurs devront être capables de supporter le passage du courant
maximal du moteur et réaliser la coupure électrique de courant. C’est un point important pour
le choix de ces capteurs.
Le système roue-vis sans fin
Pour une question de sécurité, le système roue/vis sans fin est irréversible. En effet, cela
permet de ne pas pouvoir l’ouvrir de l’extérieur en forçant sur le volet.
La liaison moteur/arbre
Il faut aussi prévoir d’adapter le moteur sur l’arbre du boy. L’arbre étant hexagonal et la sortie
du moteur le plus souvent une tige ronde, il faut élaborer un système permettant de joindre les
deux.
1.4.2. La maquette
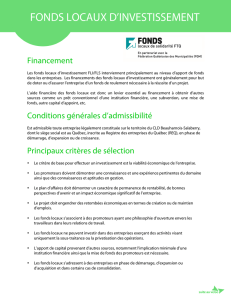
Le moteur
Nous avons pris pour notre maquette un moteur de l’essuie glace Mercedes. En effet, ses
caractéristiques conviennent très bien à l’usage voulu.
Il permet, sous une alimentation de 12Volts / 10A continus, un couple de 8Nm avec une
vitesse de rotation de 32tr/min, ce qui assure une ouverture en 14 secondes.
C’est un moteur à courant continu qui permet d’obtenir une rotation dans les 2 sens, grâce à
une inversion d’alimentation (utilisation d’un montage en H).
La fiche technique de ce moteur se trouve en annexe n°1.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%