1°STI2D-SIN 2014/ 2015 I) Que faut-il définir avant d`étudier un

PAGE 1 SUR 5
1°STI2D-SIN
PHYSIQUE
TROISIEME PARTIE : « TRANSPORT »
2014 / 2015
COURS – TP SUR LE CHAPITRE 14 « MOUVEMENTS DE TRANSLATION ET DE ROTATION – VITESSE ET ACCELERATION »
I) Que faut-il définir avant d’étudier un mouvement (rappels de seconde) ?
Avant d’étudier un mouvement, il faut préciser le système étudié et le référentiel de l’étude.
1) Définition du système étudié.
On appelle système étudié, le solide dont on étudie le mouvement.
2) Définition du référentiel.
On appelle référentiel, le solide de référence par rapport auquel on étudie le mouvement d’un solide.
On associe toujours à un référentiel un repère d’espace (exemple : le repère cartésien (Ox ; Oy) et un repère de temps
(exemple : une horloge).
II) Relativité du mouvement (rappels de seconde).
Le mouvement d’un solide dépend du référentiel d’étude : on dit qu’il est relatif.
Décrire un mouvement n’a de sens que si l’on précise par rapport à quel référentiel ce mouvement est considéré.
III) Description d’un mouvement d’un solide dans un référentiel donné (rappels de seconde).
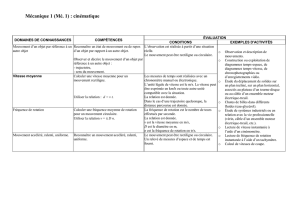
Un mouvement d’un solide dans un référentiel donné se décrit à l’aide de deux adjectifs : un pour qualifier la nature de la
trajectoire et un pour qualifier l’évolution temporelle de la vitesse instantanée.
Exemples d’adjectifs qualificatifs
de la nature de la trajectoire
Exemples d’adjectifs qualificatifs de l’évolution temporelle de
la vitesse instantanée
……………………………………… si la trajectoire est une droite
……………………………………… si la vitesse instantanée reste
constante au cours du temps
……………………………………… si la trajectoire est un cercle
……………………………………… si la vitesse instantanée augmente au
cours du temps
……………………………………… si la trajectoire est une hélice
……………………………………… si la vitesse instantanée diminue au
cours du temps
……………………………………… si la trajectoire est une courbe
quelconque
IV) Vitesse moyenne, vitesse instantanée, accélération moyenne, accélération instantanée.
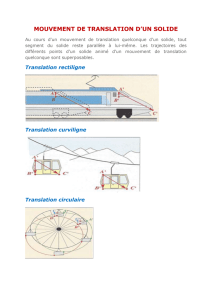
Soit la chronophotographie sur laquelle sont repérées les positions A0, A1, …, A5 d’un solide en mouvement respectivement aux
dates t0, t1, …, t5.
Vitesse moyenne du solide entre les positions A0 et A5
Vitesse instantanée du solide par exemple à la position A2
vm =
05
50
tt
AA
Unités : vm en m.s–1 si A0A5 en m et si (t5 – t0) en s.
13
31
Att
AA
v2
Unités :
2
A
v
en m.s–1 si A1A3 en m et si (t3 – t1) en s.

PAGE 2 SUR 5
Accélération moyenne du solide entre les positions A0 et A5
Accélération instantanée du solide par exemple à la position A2
am =
05
AA
tt
-vv05
Unités : am en m.s–2 si
)-v(v 05 AA
en m.s–1 et si (t5 – t0) en s.
13
AA
Att
-vv
a13
2
Unités :
2
A
a
en m.s–2 si
)-v(v 13 AA
en m.s–1 et si (t3 – t1) en s.
V) Mouvements de translation.
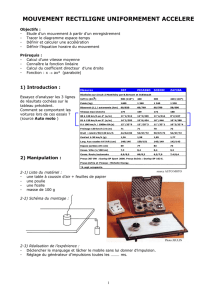
1) Définition.
Un solide est en mouvement de translation si le segment formé par deux points quelconques du solide reste parallèle à lui-
même au cours du temps. En conséquence, tous les points d’un solide en translation ont la même vitesse à chaque instant.

PAGE 3 SUR 5
2) Etude expérimentale d’un mouvement de translation rectiligne uniformément accéléré.
COMPETENCES EXIGIBLES OFFICIELLES
COMPETENCES MISES EN JEU
Savoir calculer des vitesses et des
accélérations.
Dans le cas d’un mouvement de
translation rectiligne uniforme ou
uniformément accéléré :
Ecrire et appliquer la relation
entre distance parcourue x et la
durée t ;
Ecrire et appliquer la relation
entre la vitesse v et la durée t.
S’APPROPRIER
– – –
ANALYSER
– – –
RÉALISER
REA2, REA4, REA5
VALIDER
VAL1
COMMUNIQUER
COM2, COM3
ÊTRE AUTONOME, FAIRE PREUVE D’INITIATIVE, SAVOIR-ÊTRE
AUT1, AUT2, AUT3
CONTEXTE :
Une balle est lâchée sans vitesse initiale. On a filmé ce mouvement et obtenu un clip vidéo. Le but de ce TP est de réaliser une
étude expérimentale d’un mouvement de translation rectiligne uniformément accéléré pour en déduire des relations simples entre
la position et la durée ou entre la vitesse et la durée.
TRAVAIL A EFFECTUER :
Q1) REALISER.
A l’aide du logiciel de pointage AVIMECA®, ouvrir le clip vidéo enregistré. Procéder alors :
Au réglage automatique de la taille du clip sur l’écran ;
A l’étalonnage : la règle mesure 2,00 m de hauteur ;
Au choix de l’image n°6 comme origine des dates ;
A la mise en place du système d’axes : on prendra la balle de l’image n°7 comme référence de l’axe des ordonnées orienté vers
le bas ;
Au pointage du clip entre l’image n°7 et l’image n°19 ;
A l’envoi des données pointées dans le logiciel REGRESSI®.
Faire calculer à REGRESSI® la valeur v de la vitesse instantanée à la date ti définie par la syntaxe
1-it1it
1-i
y
1i
y
v
.
Faire calculer à REGRESSI® la valeur a de l’accélération instantanée à la date ti définie par la syntaxe
1-it1it
1-iv1iv
a
.
Q2) VALIDER ET COMMUNIQUER.
Q2a) A PROPOS DE L’ACCELERATION.
Déterminer la valeur moyenne de l’accélération : a = ………............
Pourquoi peut-on ici parler de mouvement de translation rectiligne « uniformément accéléré » ?
………………………………………………………………………………………………………………………………………………………………………………………………………………
Que vous rappelle cette valeur moyenne de l’accélération ?
………………………………………………………………………………………………………………………………………………………………………………………………………………
Q2b) A PROPOS DE LA VITESSE INSTANTANEE.
Afficher la représentation graphique de v = f(t) puis la modéliser par une fonction affine : v = m t + n.
Relever les valeurs :
Du coefficient directeur : m = ………............ ;

PAGE 4 SUR 5
De l’ordonnée à l’origine : n = ………............
Comparer a et m.
………………………………………………………………………………………………………………………………………………………………………………………………………………
Que représente physiquement m ?
………………………………………………………………………………………………………………………………………………………………………………………………………………
Que représente physiquement n ?
………………………………………………………………………………………………………………………………………………………………………………………………………………
Q2c) A PROPOS DE LA POSITION.
Afficher la représentation graphique de y = f(t) puis la modéliser par un polynôme du second degré : y = p t2 + q t + r.
Relever les valeurs des coefficients :
p = ………............ ;
q = ………............ ;
r = ………............
Comparer p et m.
………………………………………………………………………………………………………………………………………………………………………………………………………………
Comparer n et q.
………………………………………………………………………………………………………………………………………………………………………………………………………………
Justifier la valeur quasi-nulle de r.
………………………………………………………………………………………………………………………………………………………………………………………………………………
Q2d) Conclusions générales.
Mouvement de translation rectiligne
uniformément accéléré selon l’axe Ox
Mouvement de translation rectiligne
uniforme selon l’axe Ox
Accélération
a = constante
a = 0
Vitesse instantanée
v(t) =
v =
Position
x(t) =
x(t) =
VI) Mouvements de rotation autour d’un axe fixe.
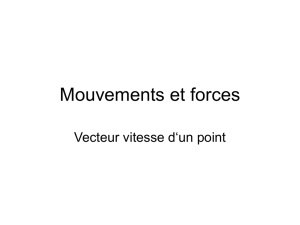
1) Définition.
Un solide est en mouvement de rotation autour d’un axe fixe si :
Les points situés sur l’axe de rotation sont immobiles ;
Les points en dehors de l’axe décrivent, pendant un intervalle de temps donné, des arcs de cercles centrés sur l’axe.
2) Mouvement de rotation uniforme autour d’un axe fixe.
a) Vitesse angulaire.
La vitesse angulaire ω est le quotient de l’angle balayé α par un point par la durée Δt du balayage soit :
ω =
Δt
α

PAGE 5 SUR 5
Unités : ω en rad.s–1 si α en rad et si Δt en s.
Remarques : ω est constante au cours du temps dans le cas d’un mouvement de rotation uniforme.
Tous les points d’un solide en mouvement de rotation possèdent la même vitesse angulaire.
b) Relation entre vitesse et vitesse angulaire.
Les points situés à l’extrémité des pales d’une éolienne se déplacent plus vite que ceux situés près de l’axe de rotation.
La vitesse v d’un point d’un solide en mouvement de rotation dépend de sa distance R à l’axe de rotation et de la vitesse
angulaire ω du solide. Elle est donnée par :
v = R ω
Unités : v en m.s–1 si ω en rad.s–1 et si R en m.
*****
1
/
5
100%