Appelez le professeur

CINEMATIQUE
TP
Transstockeur
Lycée A. KASTLER
91410 DOURDAN
Références au programme :
Note
/20
(S5.5) Analyse comportementale du bien (cinématique).
-Caractérisation du mouvement d’une pièce dans un mécanisme.
BTS MS-SP1
Nom
Page
1
/
5
08/03/2015
17:27
I) Problématique technique
La société logitrans souhaite augmenter la vitesse de déplacement (axe Z) de son transstockeur.
II) Présentation système
Le système étudié est le transstockeur de la société
Logitrans, c’est le même que celui de l’atelier de
maintenance. Il est programmé pour fonctionner dans les
conditions suivantes :
o Axe Z Acc : 1000ms
o Axe Z Vmax : 25%
o Axe Z Gain : 2
La vitesse de translation verticale suivant l’axe Z est
relevé à l’aide d’un oscilloscope branché sur l’entrée
vitesse (+ ou – 10V) sur le coté de la platine de
commande.
L’oscilloscope est calibré de la manière suivante :
• Calibre horizontal : 1s par carreau
• Calibre vertical : 5V par carreau.
L’acquisition de la courbe de vitesse de l’axe Z est la suivante :
Photo du transstockeur

BTS MS-
SP1 CINEMATIQUE Transstockeur TP
Page 2/5
Nom
E:\TP Transstockeur\Cinématique equation mouvement (transstockeur).doc
III) Activité de recherche :
Afin de répondre à la problématique technique, vous allez déterminer la vitesse actuelle de
rotation du moteur à l’aide des questions suivantes.
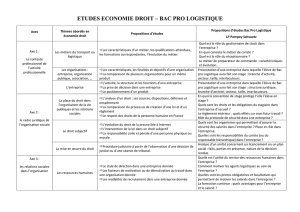
II.1.1) Ecrire les valeurs de la vitesse et du temps caractéristique de la courbe suivante en vous
aidant de l’acquisition de courbe à l’oscilloscope de la page précédente.
II.1.2) Calculer et écrire la valeur de V
M.
On sait que la distance totale parcourue est égale à la
surface faite entre la droite des temps et la courbe des vitesses.
Appelez le professeur
☺
II.2) Détermination des caractéristiques du mouvement
t (s)
v
(m/s)
t
1
=
t
2
=
t
3
=
Courbe réelle
Courbe théorique
Distance totale X
3
= 0.8 m.
Surface1 =
Surface2 =
Surface3 =
Surface totale =
Equation de V
M
=
V
M
=

BTS MS-
SP1 CINEMATIQUE Transstockeur TP
Page 3/5
Nom
E:\TP Transstockeur\Cinématique equation mouvement (transstockeur).doc
Connaissant la distance totale parcourue par le solide, nous allons déterminer les équations du
mouvement pour les trois phases. Quels que soient les résultats obtenus question précédente, on
prendra comme valeurs de la vitesse et des temps celles données pages suivantes.
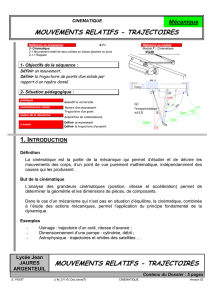
II.2.1) Phase 1 : à partir des conditions aux limites déterminer x
1
(t), v
1
(t) at a
1
(t). Déterminez
également x
1
(t
1
).
On a un mouvement uniformément varié donc
x
1
(t)= 0.5 a
1
t
2
+v
1
t+x
1
Conditions aux limites :
v
1
(t)= a
1
t +v
1
à t =0 ; ………………………………………………………….
a
1
(t) = a
1
à t = 0,9s
; …………………………………………………….
Appelez le professeur
☺
II.2.2) Phase 2 : à partir des conditions aux limites déterminer x
2
(t), v
2
(t) at a
2
(t). Déterminez
également x
2
(t
2
).
On a un mouvement uniforme donc :
x
2
(t)= v
2
t +x
2
Conditions aux limites :
v
2
(t)= v
2
à t = 0,9s
; ………………….…………
a
2
(t) = 0 à t = 3,8s
;………..……………………
v (m/s)
t
1
=0,9
0,18
t (s)
t (s)
v (m/s)
t
1
=0,9
t
2
=3,8
0,18
x
1
(t)= x
1
(t
1
)=
v
1
(t)=
a
1
(t) =
X
2
(t)= x
2
(t
2
)=
V
2
(t)=
a
2
(t) =

BTS MS-
SP1 CINEMATIQUE Transstockeur TP
Page 4/5
Nom
E:\TP Transstockeur\Cinématique equation mouvement (transstockeur).doc
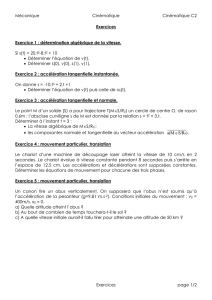
II.2.3) Phase 3 : à partir des conditions aux limites déterminer x
3
(t), v
3
(t) at a
3
(t). On a comme
conditions aux limites x
3
(t
3
)= 0.8 m. Déterminer V
M.
On a un mouvement uniformément varié donc
x
3
(t)= 0.5 a
3
t
2
+ v
3
t +x
3
v
3
(t)= a
3
t + v
3
à t = 3,8s;………………………
a
3
(t) = a
3
à t = 6s
; ……………………..…
Appelez le professeur
☺
Lors de la détermination de la vitesse V
M
, nous avons considéré, que la troisième phase était
assimilable à un MRUV. Or la décélération n’est pas constante, et si l’on tient compte de cette
phase, on trouve une vitesse V
M
réelle de 0,2 m/s.
II.2.4) Sachant que le système fonctionne à 25% de la vitesse maximum, déterminez cette
vitesse maxi atteinte par le système pour 100% (ce sera celle voulue par la société).
II.2.5) Compléter la chaîne cinématique suivante caractéristique de l’axe Z à l’aide de la
documentation technique et de vos connaissance.
II.2.6) Déterminer par le calcul et la chaine cinématique ci-dessus, la vitesse de rotation
maximum du moteur commandant l’axe.
t (s)
v (m/s)
t
2
=3,8
t
3
=6
0,18
X
3
(t)=
V
3
(t)=
a
3
(t) =
Moteur Réducteur
R=
Poulie
couroie
D
poulie
=
Plateau
axe Z
V
M
=
Mouvement
de Mouvement
de Mouvement
de

BTS MS-
SP1 CINEMATIQUE Transstockeur TP
Page 5/5
Nom
E:\TP Transstockeur\Cinématique equation mouvement (transstockeur).doc
Appelez le professeur
☺
II.2.7) A l’aide du dossier technique, et des résultats de l’étude précédente, compléter le
tableau suivant.
Valeur calculée Valeur document technique
Vitesse de rotation maxi du
moteur axe Z ( en Tr/mn)
Comparaison vitesse,
compléter par < ou > ou =. V max calcul
l
……………… Vmax possible
Conclusion
Appelez le professeur
☺
II.2.8) Remplir la fiche de synthèse avec les mots suivants
Appelez le professeur
Rotation
;
Translation
;
Poser les conditions initiales
;
Calculer les valeurs à t=O
;
Ecrire les
équations finales ; Identifier le type de mouvement ; Rassembler les données du problème et
convertir les unités.
 6
6
1
/
6
100%