TD Mécanique du point

Mécanique du point page 1/
3
MÉCANIQUE DU POINT
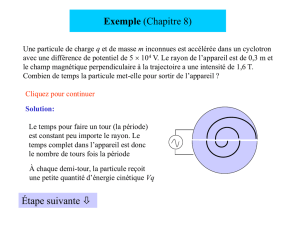
I- Un plan incliné parfaitement lisse fait un angle α avec le plan
horizontal. On note ∆ l’intersection de ces deux plans. On lance d’un point
O de ∆ une particule P de masse m, avec une vitesse initiale qui fait
l’angle θ avec ∆. Étudier le mouvement de l’objet P qui est toujuors en
contact avec le support. On néglige les frottements.
II-1) Une particule P de masse m est suspendue à un point O par un
fil inextensible et sans masse de longueur ℓ.
a) Quelle vitesse angulaire ω constante autour de la verticale doit-on
communiquer à P pour qu'elle décrive un cercle horizontal, le fil faisant avec la verticale un
angle θ donné ?
b) Quelle est alors la période T de ce pendule conique dans le référentiel lié au sol ?
c) Toutes les valeurs de ω correspondent-elles à une telle situation ?
2) La particule P est reliée à un deuxième point O’, à la verticale de O, par un deuxième
fil de même longueur ℓ. La distance OO’ est égale à 2a. Elle est inférieure à 2ℓ.
a) À partir de quelle vitesse angulaire ω
0
le fil PO’ est-il tendu ?
b) Pour une vitesse de rotation ω supérieure à ω
0
, calculer en fonction de m. ℓ, ω
et ω
0
les modules des tensions exercées par les deux fils sur P.
III- La sonde spatiale Rosetta s'est placée en orbite autour de la comète
67P/Tchourioumov-Guérassimenko puis, après une période d'observation de plusieurs mois, a envoyé le
12 novembre 2014 Philae, un petit atterrisseur, se poser sur sa surface pour analyser la composition de
son sol et sa structure. Le texte suivant décrit la chronologie de cet « atterrissage ».
8h35 : l’atterrisseur est largué par le vaisseau mère Rosetta. Il chute vers son objectif durant 7
heures à la vitesse de 0,90 m.s
–1
.
15h34 : impact de l’atterrisseur sur le sol de la comète. Philippe Gaudon, chef de projet de la
mission Rosetta pour le CNES, est rassuré : « ce qui est incroyable, c’est la précision du minutage de
l’atterrissage, cela signifie que Philae doit être pratiquement au centre de l’ellipse visée. Et puis, nous
continuons à recevoir des données, donc il n’est pas sur le toit ! ».
Près de 5 minutes après le contact avec la surface, les caméras embarquées doivent commencer
à réaliser le panorama à 360° du paysage qui entoure Philae. Le moment est historique et pourtant,
progressivement, les visages radieux au centre de contrôle se contractent : les images reçues sont
floues, et les données de puissance électrique des panneaux solaires reçues ici sont incohérentes.
Normalement, une fois Philae posé et ancré, les panneaux doivent être plus ou moins éclairés selon leur
orientation par rapport au Soleil, mais leur puissance électrique doit demeurer stable. Or ce n’est pas
du tout le cas et les courbes visibles sur les écrans montrent sans ambiguïté que la puissance de tous les
panneaux fluctue. Y a-t-il un problème électrique majeur ou l’atterrisseur est-il encore en train de
bouger ?
En fait, comme le laissaient craindre les tests effectués dans la nuit, le système propulsif à gaz
froid qui doit plaquer Philae au sol ne s’est pas activé et les harpons n’ont donc pas été déclenchés. Le
robot a alors rebondi mais, les trois pieds du train d’atterrissage étant équipés d’absorbeurs de chocs,
sa vitesse a heureusement été divisée par deux. Deux heures d’angoisse et d’incompréhension vont
suivre…
17h25 : second impact. L’atterrisseur vient de toucher le sol à nouveau. Plus personne ne sait
où il se trouve.
Le lendemain, le centre de contrôle annonce dans la presse que Philae est remonté à près de 1
km d’altitude et finalement retombé à plus de 1 km de son premier point d’impact.
Sachant que la direction de chute de Philae depuis son largage faisait un angle de 15° avec la
verticale, et en supposant que le rebond de Philae s’est fait symétriquement à cette verticale avec une
O
P
ℓ
θ
O
P
ℓ
θ
O’
ℓ
a
a
∆
α
θ
v
0
O
P

Mécanique du point page 2/
3
division par deux de la norme de sa vitesse, justifier les valeurs numériques indiquées dans le
texte concernant ce rebond .
Données :
masse de la comète : m
com
= 1,0×10
13
kg ;
masse volumique de la comète : µ
com
= 400 kg⋅m
–3
;
constante gravitationnelle : G = 6,67×10
–11
U.S.I.;
distance de largage par rapport au centre : r
larg
= 22,5 km ;
masse de l’atterrisseur Philae : m
Ph
= 98 kg ;
IV-Soit une particule P de masse m mobile le long d’une direction que l’on note Ox. Elle
possède l’énergie potentielle
U
x U e
x
a
( ) = −
−
0
2
2
où a et U
0
sont des constantes positives (il n’y a pas
d’autres force exercée).
1) Déterminer et étudier la stabilité de la (ou les) position(s) d’équilibre de la particule.
2) On lance la particule depuis l’origine O avec une vitesse initiale
v
0
= v
0
e
X
. Quel est son
mouvement en fonction de la valeur de v
0
?
3) Étudier les cas particuliers
vU
m
00
=
puis v
0
≈ 0. Exprimer en particulier la période du
mouvement, sous la forme d’une intégrale (qu’on ne calculera pas) dans le premier cas, sous la forme
d’une expression où apparaissent m, U
0
et a dans le second cas.
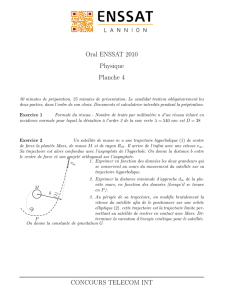
V-Soit un jeu de petites voitures pouvant se
déplacer le long de profils de route variés AB (distance d).
La voiture a une masse m et l’on négligera les frottements.
Elle est lancée avec une vitesse initiale de module v
0
dans
la direction de la route. On considère deux types de profil
de route:
un profil (I) rectiligne et horizontal de longueur d
entre A et B ;
un profil (II) présentant une « cuvette » avec des
bords faiblement inclinés ;
un profil (III) présenté sur la figure ci-contre.
1) Calculer le temps mis par la voiture pour
effectuer le parcours (I) en l’absence de frottements.
2) Même question pour le parcours (II), mais on ne
présentera qu’une solution qualitative.
3) Pour le profil (III), peut-on encore tenir le
raisonnement fait ci-dessus ? Pourquoi ?
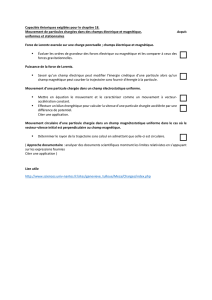
VI-On étudie le mouvement d’une particule de charge q et de masse m dans un référentiel
galiléen R. On la repère dans la base cartésienne (O,
u
X
,
u
Y
,
u
Z
). Elle est soumise à un
champ électrique uniforme
E
= E
u
Y
(E > 0) et à un champ magnétique uniforme
B
= B
u
Z
(B > 0). La particule part de l’origine des positions O avec une vitesse initiale de
module v
0
, dans le plan (O,
u
X
,
u
Y
) et faisant l’angle α avec
u
X
(α ∈ [0, 2π]).
1-a) Écrire les équations différentielles vérifiées par v
X
(t), v
Y
(t) et v
Z
(t).
b) En déduire les équations paramétriques x(t), y(t) et z(t) de la trajectoire
en fonction de q, m, E, B, v
0
et α.
c) Écrire les équations précédentes lorsque la vitesse initiale est nulle. Représenter
l’allure de la trajectoire dans ce cas en donnant les coordonnées de quelques points importants.
2) On étudie ce dernier mouvement dans le référentiel R’ en translation rectiligne et uniforme à
la vitesse
V
Vu=
X
(V > 0) par rapport à R.
a) Quelle relation doit vérifier V pour que dans R’ l’équation du mouvement soit
indépendante du champ électrique ?
d
g
h
A B
PROFIL
II
d
g
h
A B
d/3 d/3 d/3
PROFIL
III
u
X
u
Y
u
Z
B
E
v
0
α

Mécanique du point page 3/
3
b) Quelle est la trajectoire de la particule dans R’ dans ce cas ?
VII-Sur un plateau plan horizontal, percé d’un trou O, une particule P de masse m se déplace
sans frottement. Elle est attachée à un fil passant par le trou. On exerce sur l’autre extrémité du fil une
traction T(t) telle que la longueur OP s’écrit ℓ(t) = a – bt.
1) Décrire le mouvement pour une vitesse angulaire initiale ω
0
de OP.
2) Calculer le travail fourni par l’opérateur exerçant la force T(t) entre l’instant initial et l’instant
τ où OP = ℓ(τ) .
VIII-Une particule M, de masse m et de charge q > 0, est placée dans un champ électrostatique
radial dirigé vers le point O de norme
E E r
r
n
=
F
H
G
I
K
J
00
où E
0
, r
0
et n sont des constantes. On suppose E
0
> 0,
r
0
> 0 et r =
OM
→
.
1) Donner les équations différentielles qui gouvernent le mouvement de M.
2) Préciser les conditions initiales pour que la trajectoire soit un cercle de centre O et de rayon
r
0
.
3) Étudier la stabilité de la trajectoire circulaire en fonction de n. Cas du champ newtonien ?
4) La vitesse initiale a une norme v
0
qui ne correspond pas à une trajectoire circulaire. Discuter
la nature de la trajectoire en fonction de v
0
dans le cas où n = 2.
IX-Dans le référentiel géocentrique supposé galiléen, un satellite, de masse m = 400 kg assimilé
à un point matériel P est en orbite autour de la Terre de masse M = 6,00×10
24
kg et supposée sphérique
de rayon R = 6400 km.
On note G la constante de gravitation universelle de valeur : G = 6,67×10
–11
m
3
⋅s
–2
⋅kg
–1
et l’on
pose k = GmM.
La force gravitationnelle exercée par la Terre sur le satellite est donnée par la relation
F
k
r
u= −
2
dans laquelle r est la distance entre le centre O de la Terre et le point P et
u
le vecteur
unitaire dirigé de O vers P, on néglige toute force de freinage due à l’atmosphère terrestre.
1) Déterminer, à partir de l’expression de la force gravitationnelle, celle de l’énergie potentielle
E
P
du satellite dans le champ de gravitation terrestre en fonction de k et de r, cette énergie potentielle
étant nulle «à l’infini».
2) Dans le référentiel géocentrique , le satellite décrit, autour du centre de la Terre, une orbite
circulaire à l’altitude h telle que h = α.R.
a) À partir de la relation fondamentale de la dynamique, déterminer l’expression littérale
de sa vitesse V
0
en fonction de G, M, R et α puis calculer sa valeur numérique si
2
5,00 10
−
α = ×
.
b) En déduire l’expression littérale dé l’énergie mécanique en fonction de k, R et α puis
calculer sa valeur numérique si α = 5,00×10
–2
.
3) On ne se limite plus à l’étude d’une trajectoire circulaire.
a) Démontrer que le moment cinétique
σ
du satellite par rapport au centre O de la Terre
est constant. En déduire que la trajectoire est plane.
b) La position du satellite est repérée, dans le plan de la trajectoire, par ses coordonnées
polaires r et θ. Exprimer, dans ce système de coordonnées, le module σ du moment cinétique du
satellite.
4) Le satellite étant situé en un point P d’altitude h = α.R avec α = 5,00×10
–2
, on lui
communique une vitesse perpendiculaire au rayon vecteur
OP
→
et de valeur : V = β.V
0
, en notant
toujours V
0
la valeur qui lui permettrait de décrire une orbite circulaire. Calculer, d’abord sous forme
littérale puis en effectuant les applications numériques, entre quelles valeurs doit être compris β si l’on
veut éviter que le satellite s’écrase sur le sol, mais aussi qu’il échappe définitivement à l’attraction de la
Terre.
1
/
3
100%