DS1 - MP*1

1
MP*1-2016/2017
DS1
D’après Mines MP-1997
Etude de quelques problèmes relatifs à la navigation,
l’aéronautique et l’espace.
La navigation consiste à conduire un mobile d’un point à un autre, en sachant définir à tout
instant la position de ce dernier par rapport à des références fixes. Au cours des millénaires,
l’art historique de la navigation, constitué de procédés, de pratiques et de théories s’est enrichi
des moyens, des phénomènes et des instruments amenés, révélés ou produits par les avancées
scientifiques.
0. (Ne pas consacrer à cette question plus de trois minutes, environ) Indiquer,
éventuellement dater approximativement, quelques moyens ou quelques outils de repérage de
navigation de votre connaissance.
PARTIE A - NAVETTE SPATIALE ; MISE SUR ORBITE D’UN SATELLITE
Le repérage de la position d’un mobile (navire ou aéronef en vol) relativement à des repères
fixes utilise et utilisera de façon croissante des satellites de radiopositionnement, comme ceux
du système GPS (Global Positioning System) élaboré par la NASA. Cette partie étudie
quelques aspects de la mécanique des lancements de ces satellites, depuis le véhicule que
constitue la navette spatiale. Le lancer d’un satellite depuis cette navette se fait en trois étapes
successives : la navette est d’abord mise en orbite circulaire, au moyen de fusées auxiliaires ;
à partir de cette orbite circulaire, la navette éjecte le satellite qui gagne progressivement une
altitude plus élevée ; enfin, une fois parvenu à son altitude définitive, le satellite s’y stabilise
au moyen d’un dispositif de freinage.
Dans l’ensemble de cette partie, la Terre est assimilée à un astre à symétrie sphérique, de
rayon , de centre fixe à l’origine des coordonnées d’un référentiel galiléen On
appelle l’accélération de la gravitation au niveau du sol, et la période de révolution
propre de la Terre autour de l’axe des pôles. La navette spatiale et le satellite qu’elle emporte
sont assimilés à deux points matériels notés respectivement et .
Pour les applications numériques, on prendra et
A.I - LANCEMENT DE LA NAVETTE SPATIALE
La navette spatiale et son satellite sont solidaires. Avec l’équipage et la charge utile,
l’ensemble est assimilé à un point matériel unique de masse . Le tout est en orbite circulaire
d’altitude et de rayon Cet ensemble subit une force attractive de la part
de la Terre :
.

2
1. Déterminer, dans et en fonction des constantes et , la vitesse la vitesse
angulaire .
2. Déterminer l’énergie potentielle du système et en déduire l’énergie mécanique
de l’ensemble en fonction des constantes et et de .
3. Application numérique : déterminer l’altitude qu’il faut atteindre pour obtenir la période
de rotation de 12 heures, qui est celle des satellites du système GPS.
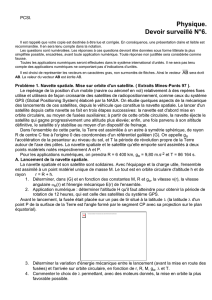
Avant le lancement, la fusée était placée sur un pas de tir
situé à la latitude (la latitude d’un point P de la sur-
face de la Terre est l’angle formé par le segment CP avec
sa projection sur le plan équatorial).
4. Déterminer, dans le référentiel géocentrique, la
variation d’énergie mécanique de la fusée, de masse M,
entre le lancement (avant la mise en route des fusées) et
l’arrivée sur orbite circulaire, en fonction de r, R, M, g0,
et T dans le référentiel On explicitera d’abord l’énergie cinétique, l’énergie potentielle
et l’énergie mécanique de la fusée avant le lancement en fonction de r, R, M, g0, et T.
5. Commenter le choix de permettant, avec des moteurs donnés, la mise en orbite la plus
favorable possible.
6. Application numérique : l’orbite à atteindre est située à l’altitude de . Calculer
l’économie d’énergie réalisée par unité de masse du système lancé, lors du passage du pas de
tir d’Edwards (Californie, 1 = 34°50’N) à celui de Cape Canaveral (Floride, 2 = 28°30’N) ;
à titre documentaire, un gramme d’essence fournit, typiquement, dans un moteur à
explosion. Calculer aussi la vitesse sur orbite
A.II - LE SATELLITE DANS LA SOUTE DE LA NAVETTE ; LANCEMENT
La navette spatiale ayant atteint l’orbite décrite en A.I (circulaire de rayon
, parcourue à la
vitesse uniforme
), de période de rotation heures, le satellite qu’elle contient
dans la soute est alors libéré de ses fixations afin de le préparer au lancement. Le satellite est
alors dit en impesanteur dans la soute et l’on souhaite préciser cette notion.
L’ensemble de l’étude est réalisé dans le référentiel , lié à la
navette, en rotation uniforme autour de la Terre par rapport à . On
appelle le centre de ce référentiel, confondu alors avec le centre de
masse de la navette spatiale. Ce référentiel a pour axes fixes les axes
liés à la base orthonormée où est radial et coli-
néaire à la trajectoire circulaire de la navette.
Enfin, le satellite sera assimilé à un point matériel de masse
repéré par :
7. Quelles sont les forces qui s’exercent, dans , sur le point matériel ? On donnera leurs
expressions vectorielles respectives en fonction de
et de la vitesse
de P relative au référentiel , étant le projeté de sur l’axe .
P
Pôle Nord
Pôle Sud
Équateur
C
Pas de tir, P
C
A
er
e
P

3
8. Montrer que ces forces, soit ne travaillent pas dans soit dérivent d’une énergie poten-
tielle dont on donnera l’expression en fonction de
,
et
seulement.
9. Montrer que l’énergie potentielle, au voisinage du point A, peut s’exprimer sous la forme
. Exprimer et en fonction de et de
, puis en fonction de
et la pulsation de la navette spatiale.
On donne :
si
10. Établir les équations du mouvement de dans , la force dérivant de l’énergie
potentielle précédente étant
. Que peut-on dire de la stabilité de
la (ou des) position(s) d’équilibre du satellite? Discuter le concept d’impesanteur au sein d’un
véhicule et les conditions de son observation.
11. L’orbite de la navette a maintenant une période de heures dans sa rotation autour de
la Terre, un astronaute, assimilé à un point matériel de masse , situé initialement en A,
quitte la navette avec les vitesses initiales suivantes :
a) On suppose que :
0 oyox vv
et
1
.15
smvv ooz
. Quelle est la trajectoire de ?
Quelle est la distance maximale de l’astronaute à la navette au cours de son mouvement ?
Retournera-t-il à la navette ? Si oui en combien de temps ?
b) On suppose que :
0 oyoz vv
et
1
.15
smvv oox
. Mêmes questions qu’au a).
c) On suppose que :
0 oxoz vv
et
1
.15
smvv ooy
. Mêmes questions qu’au a).
Dans quelle direction préfériez-vous quitter le vaisseau ?
Problème 2 :
Principe d’un gyromètre vibrant
Même s’il ne s’agit pas des gyromètres les plus performants, les gyromètres vibrants
ont l’avantage majeur de pouvoir être miniaturisés et fabriqués à faible coût. Ils trouvent ainsi
leurs applications dans des domaines variés : stabilisation de caméscopes, navigation
automobile.. Ce problème propose de comprendre le principe général de ce type de
gyromètres en s’appuyant sur l’exemple du micro-gyromètre VIG développé par l’ONERA
(Office National d’Etudes et de Recherches Aérospatiales).
La structure du gyromètre VIG est analogue à celle d’un diapason. Afin de simplifier
les calculs, on remplace cette structure par un système masse-ressorts. On considère ainsi une
masse ponctuelle localisée au point accrochée à deux ressorts et de constantes de
raideur respectives et et de longueur à vide et . La masse est astreinte à se déplacer
uniquement dans le plan horizontal , perpendiculaire au champ de pesanteur, l’origine

4
étant la position de la masse à l’équilibre. Hors équilibre, la masse est repérée à la date par
ses coordonnées et telles que et soient très petits devant et . Dans tout le
problème on mettra à profit ces inégalités afin de linéariser les équations.
On suppose dans un premier temps que le référentiel de repère est galiléen et
l’on néglige dans la première question tout frottement.
1- Etablir le système d’équations différentielles vérifiées par et Préciser les
deux pulsations caractéristiques du système, notées et en précisant le mouvement de la
masse (appelé « mode ») pour chaque pulsation.
On prend en compte les frottements dans la suite du problème : la masse, de vitesse ,
subit une force de frottement de la forme
. Par ailleurs, on excite le système en
déplaçant le point d’attache du ressort de manière sinusoïdale selon . L’abscisse de
sur est de la forme avec .
2- Déterminer le nouveau système d’équations différentielles. On introduire les
pulsations et trouvées dans la question 1.
3- Montrer que les solutions du système précédent s’expriment comme la somme
d’une solution transitoire tendant vers zéro et d’une solution particulière appelée solution du
régime sinusoïdal forcé. Par la suite on ne considérera que cette solution. Déterminer
l’expression de et qu’on mettra sous la forme et
. Il pourra être judicieux pour trouver ces expressions d’introduire la fonction
complexe avec et d’écrire l’équation différentielle
complexe vérifiée par . Donner les expressions de en fonction de
et . Les deux modes sont-ils excités par le déplacement du point ?
4- On définit le facteur de qualité par
. On note le rapport de l’amplitude
des oscillations de sur celles de et le déphasage entre les oscillations de et de . Les
graphes ci-dessous représentent et en fonction de la fréquence f d’excitation pour le
micro-gyromètre VIG. A partir de l’étude des graphes, déterminer les valeurs numériques de
la fréquence de résonance et du facteur de qualité du mode excité.

5
5- A quelle fréquence est-il préférable d’exciter le système afin d’obtenir une
amplitude de la masse la plus élevée possible ? On se placera dans cette situation dans toute la
suite du problème.
Le plan est maintenant en rotation autour de l’axe par rapport au référentiel
terrestre supposé galiléen avec une vitesse angulaire algébrique supposée constante. Le
point effectue toujours un mouvement sinusoïdal selon comme précédemment.
6- En supposant que et , établir le nouveau système d’équations
différentielles vérifiées par et en fonction de et .
Dans la littérature, on trouve parfois la description suivante : le gyromètre vibrant
permet d’accéder à la valeur de la vitesse angulaire par la mesure de l’amplitude du mode
« détecteur » en excitant de manière contrôlée le mode « pilote ».
7- Expliquer cette phrase de manière qualitative à la lumière du système d’équations
différentielles précédent en indiquant qui joue ici le rôle du mode pilote et qui joue le rôle du
mode détecteur.
On suppose le terme négligeable et l’on se place en régime sinusoïdal forcé. On
note g le rapport de l’amplitude de la composante selon de sur celle de la composante
selon .
8- Donner l’expression de .
9- Dans le cas du micro-gyromètre VIG, la différence entre les deux modes propres
vaut . En déduire l’expression approchée de :
.
Les calculs précédents ont été menés dans l’hypothèse d’une vitesse angulaire
constante. Un calcul non précisé ici, montre que la valeur de obtenue précédemment chute
si varie trop rapidement Plus précisément, si la vitesse angulaire varie de façon
sinusoïdale, la bande passante à du gain , notée , vérifie l’inégalité :
10- Expliquer qualitativement pourquoi la différence de fréquences entre les deux
modes ( dans le cas du VIG) est issue d’un compromis entre deux impératifs que l’on
précisera.
11- Vérifier a postériori la légitimité de l’élimination de certains termes dans le
système d’équations différentielles en et pour
 6
6
1
/
6
100%