Exercice n°3 : Etude d`un accéléromètre

7
Exercice n°3 : Etude d’un accéléromètre
Un accéléromètre permet de convertir un
déplacement mécanique en un signal
électrique afin de mesurer une accélération.
La partie mécanique est constituée d’un
oscillateur mécanique : une masse m = 0,7!µg
assimilable à un point matériel A est reliée à
l’enveloppe du capteur par des « micro
poutres » élastiques modélisées par un ressort
de constante de raideur k = 0,17 N.m-1. A se
déplace sur l’axe (Oz) fixe par rapport au
boîtier. A est en outre soumis à une force de
frottement visqueux de coefficient
!=6,8!!".!!! proportionnelle à la vitesse
de A. zA repère la position de A, zB celle d’un
point lié au boîtier dont on veut mesurer
l’accélération. Au repos zA = zB.
On note z = zA - zB.
1. On admet que l’équation du mouvement de A dans le référentiel lié au boîtier s’écrit :!
!+!
!!+
!
!!=−!(!)
où a(t) est l’accélération du boîtier par rapport au référentiel du laboratoire, galiléen. On se place en
régime sinusoïdal forcé : on pose !!=!!cos!(!") et !!=!!cos!(!" +!). On adopte alors la
représentation complexe avec !=!!!!"# et !=!!!"!!!"# =!!!!"#.
a. Etablir l’expression de !
!.
b. Quel est le type de filtre réalisé ?
c. Montrer que le capteur permet de mesurer a(t) en basses fréquences. Préciser pour quelles valeurs
numériques de la pulsation. Donner, dans ce cas, l’expression de z(t) en fonction de a(t).
2. Le lien entre la partie mécanique et la partie électronique est réalisé par 2 condensateurs : les armatures!
σ1 et σ2 sont liées au boîtier,!σ0 est liée à A. Le mouvement de A modifie donc les capacités des 2
condensateurs : C1 entre!σ1 et!σ0, C2 entre!σ0 et!σ2. On note 2e = 100!µm la distance entre!σ1 et!σ2. Au
repos, l’armature σ0 est équidistante de σ1 et σ2. On donne l’expression de la capacité C d’un
condensateur plan dont les armatures de surface S sont distantes de d : !=!"
! où ! est la permittivité
du milieu.
Exprimer C1 et C2 en fonction de z, e, ! et S.
3. On connecte alors C1 et C2 à un premier bloc électronique
modélisé ci-contre. On choisit !!!=!sin !!!=−!!(!)
où E = 1 V et ω1 = 2π!105 rad/s >>!ω.
a. Montrer que :
!!
!
!" =
!!−!!
!!+!!
!!!!cos!(!!!)!

8
b. En déduire !!
!
!" en fonction de e, z(t), E,!ω1 et t.
Sachant que!ω1 >> ω, le résultat précédent s’intègre simplement en !
!(!)=−!
!
!(!)!sin!(!!!). L’étage
suivant du traitement du signal est schématisé ci-dessous :
Le premier bloc est un multiplieur délivrant :
!
!!=
!
!(!)×!!(!)
!!
où !!!=!sin !!!. Le filtre passe-bas possède une fréquence de coupure de 400 Hz et un gain de 1. Le
dernier bloc est un amplificateur de tension de facteur Av.
4. a. Etablir l’expression de V2(t). Préciser les fréquences dont est composé ce signal.
b. Quel est l’effet du filtre passe-bas sur V2(t) ? En déduire V3(t) puis Vm(t).
5. Pour un accéléromètre « low-g », mesurant de faibles accélérations de fréquence maximale égale à 400
Hz, on souhaite obtenir une sensibilité de 1 V/g c’est-à-dire une variation de Vm égale à 1 V pour une
accélération égale à g = 9,8 m.s-2. Calculer la valeur de Av.
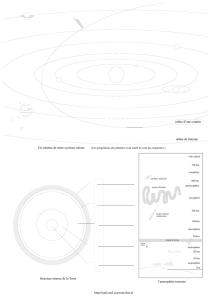
Exercice n°4 : Navette spatiale, mise sur orbite d’un satellite
Le repérage de la position d’un mobile (navire ou aéronef en vol) relativement à des repères fixes utilise et
utilisera de façon croissante des satellites de radiopositionnement, comme ceux du système GPS (Global
Positioning System) élaboré par la NASA.
Cet exercice étudie quelques aspects de la mécanique des lancements de ces satellites, depuis le véhicule
que constitue la navette spatiale. Le lancer d’un satellite depuis cette navette se fait en trois étapes
successives : la navette est d’abord mise en orbite circulaire, au moyen de fusées auxiliaires ; à partir de
cette orbite circulaire, la navette éjecte le satellite qui gagne progressivement une altitude plus élevée ;
enfin, une fois parvenu à son altitude définitive, le satellite s’y stabilise au moyen d’un dispositif de
freinage.
Dans l’ensemble de cet exercice, la Terre est assimilée à un astre à symétrie sphérique, de rayon R, de
centre C fixe à l’origine O des coordonnées d’un référentiel galiléen (RG).
On appelle g0 l’accélération de la pesanteur au niveau du sol, et T la période de révolution propre de la
Terre autour de l’axe des pôles. La navette spatiale et le satellite qu’elle emporte sont assimilés à deux
points matériels notés respectivement A et P.
Pour les applications numériques, on prendra R = 6 400 km, g0 = 9,80 m.s-2 et T = 86 164 s.

9
LANCEMENT DE LA NAVETTE SPATIALE :
La navette spatiale et son satellite sont solidaires. Avec l’équipage et la charge utile, l’ensemble est
assimilé à un point matériel unique de masse M. Le tout est en orbite circulaire d’altitude h et de rayon
r = R + h.
1. Déterminer, dans (RG) et en fonction des constantes M, R et g0, la vitesse v(r), la vitesse angulaire ω0(r)
et l’énergie mécanique E(r) de l’ensemble.
2. Application numérique : déterminer l’altitude H qu’il faut atteindre pour obtenir la période de rotation de
12 heures, qui est celle des satellites du système GPS.
Avant le lancement, la fusée était placée sur un pas de tir situé à
la latitude λ (la latitude λ d’un point P de la surface de la Terre
est l’angle formé par le segment CP avec sa projection sur le plan
équatorial).
3. Déterminer la variation d’énergie mécanique de la fusée, de
masse M, entre le lancement (avant la mise en route des fusées)
et l’arrivée sur orbite circulaire, en fonction de r, R, M, g0, λ et T.
4. Commenter le choix de λ permettant, avec des moteurs donnés, la mise en orbite la plus favorable
possible.
5. Application numérique : l’orbite à atteindre est située à l’altitude de 300 km. Calculer l’économie
d’énergie réalisée par unité de masse du système lancé, lors du passage du pas de tir d’Edwards
(Californie, λ1 = 34°50’N) à celui de Cape Canaveral (Floride, λ2 = 28°30’N) ; à titre documentaire, un
gramme d’essence fournit, typiquement, 40 kJ dans un moteur à explosion. Calculer aussi la vitesse sur
orbite v(r).
Exercice n°5 : Le looping
Une particule matérielle de masse m est lâchée sans vitesse initiale depuis A et glisse sans frottement dans
une gouttière terminée par une boucle circulaire de rayon
a.
1) Exprimer la vitesse en M repéré par θ sur la boucle
circulaire.
2) Exprimer la réaction normale Rn sur la boucle
circulaire.
3) En déduire la hauteur maximale hmin à donner à la
gouttière pour que la particule suive intégralement
la boucle circulaire et reste en contact.

10
Exercice n°6 : Pendule balistique
Une plaque carrée de coté a, de masse M, tourne sans frottements autour
d'un axe horizontal Δ = Ox coïncidant avec une de ses arrêtes.
Initialement au repos, il est mis en mouvement par un projectile de masse
m et de vitesse horizontale v0 qui le heurte en son centre. Le projectile reste
solidaire de la plaque après le choc (choc mou) et on suppose m << M.
1. Le moment d'inertie de la plaque est !∆ = 1/3 M a2 . Déterminer
l'équation du mouvement du pendule pesant ainsi constitué.
2. On note !! la vitesse angulaire initiale. Le mouvement du pendule a
une amplitude
0
θ
. En appliquant la conservation de l'énergie
mécanique, établir l'expression de !! en fonction de g, a et
0
θ
.
3. Au moment du choc, il y a conservation du moment cinétique global du système {projectile, plaque}.
3.1. Ecrire le moment cinétique par rapport à l'axe du projectile juste avant le choc et celui de
l'ensemble juste après le choc.
3.2. Appliquer la conservation et en déduire une autre expression de !!.
3.3. Déterminer l'expression de la vitesse v.
3.4. Quelle est la vitesse minimale v0 min pour que la plaque fasse un demi-tour ?$
$
$
1
/
4
100%