Cinématique du point

Cinématique du point Page 1 sur 4
SI MERMOZ
Cinématique du point
1-REFERENCE.
Tout mouvement d’un solide se fait par rapport à un autre solide appelé référence.
(Par exemple : la terre, la salle de cours, le bâti d’une machine ....)
Exemple : mouvement d’un avion par rapport au sol.
Si on considère le mouvement de l’avion 1 par rapport au sol 0 (mouvement 1/0), le
sol 0 est la référence.
Le mouvement de l’hélice par rapport à l’avion 1 (mouvement hélice/1) est une
rotation dont l’axe est l’axe de l’hélice. Le mouvement de l’hélice par rapport au sol
(mouvement hélice/0) dépend du mouvement de l’avion par rapport au sol.
Repère de référence.
Le repère de référence est un repère lié au solide de référence.
2-TRAJECTOIRE D’UN POINT.
La trajectoire du point M est la courbe décrite au cours du temps par le point M
lorsque celui-ci se déplace dans le repère de référence.
(La trajectoire est relative à un mouvement donc à un repère)
3-VECTEUR POSITION.
On considère un point M se déplaçant dans le repère de référence
La position, à un instant t donné, est définie par le vecteur position
4-VITESSE D’UN POINT.
4.1-Vitesse moyenne.
On considère un point M parcourant une distance L pendant un temps t :
La vitesse moyenne vaut alors :
t
L
Vmoy
(Unités : système international m.s-1 ; il existe d’autres unités).
4.2-Vecteur vitesse instantanée.
On considère un point M se déplaçant dans le repère R de référence.
La vitesse du point M par rapport à R est la dérivée par rapport au temps du vecteur position :
(Unités des composantes : SI : m/s , ou autres ...)
Propriété :
La vitesse est tangente à la trajectoire.
5-ACCELERATION D’UN POINT.
On considère un point M se déplaçant dans le repère R de référence.
L’accélération du point M par rapport à R est la dérivée par rapport au temps de la
vitesse du point M par rapport à R.
(Unités des composantes : SI : m/s² , ou autres ...)
dt
OMd
VM
R/
dt
Vd M
R
M
R/
/

Cinématique du point Page 2 sur 4
SI MERMOZ
Mouvement de translation rectiligne
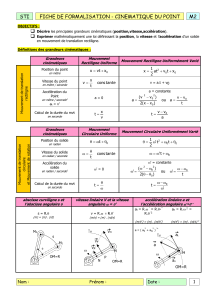
1-Définition.
Un solide est en translation rectiligne par rapport à un repère R si les
trajectoires de tous les points du solide sont des droites parallèles. La
direction commune de ces droites constitue la direction (ou l’axe) de
la translation rectiligne.
2-Equations du mouvement.
On considère un solide en mouvement de translation rectiligne d’axe
par rapport à
Soit M un des points de ce solide. Un paramètre suffit, pour ce type de mouvement, à positionner le solide : l’abscisse x.
Position :
Attention : est un vecteur unitaire horizontal, x est une valeur algébrique fonction du temps
Vitesse :
Aussi noté (v en m/s)
Accélération :
Aussi noté ( en m/s²)
Les trois fonctions du temps x, v, sont appelées équations du mouvement.
Le mouvement est accéléré si v. est positif, décéléré si v. est négatif.
3-Mouvements particuliers.
31-Mouvement rectiligne uniforme.
Le mouvement est uniforme si la vitesse est
constante c’est à dire :
v = v0 = constante (ou = 0)
Equations du mouvement :
32-Mouvement rectiligne uniformément varié.
Le mouvement est dit uniformément varié si
l’accélération est constante c’est à dire :
= constante
Equations du mouvement :
Elimination du temps entre les fonctions x et v :
Pour un mouvement rectiligne uniformément varié (avec = constante, non nulle), on a :
Conditions initiales :
à t = 0 , x = x0 , v = v0
(L’instant initial est l’instant 0)
Conditions initiales :
à t = t0 , x = x0 , v = v0
(L’instant initial est l’instant t0)
= 0
= 0
v = v0
v = v0
x = v0 t + x0
x - x0= v0 (t - t0)
Conditions initiales :
à t = 0 , x = x0 , v = v0
(L’instant initial est l’instant 0)
Conditions initiales :
à t = t0 , x = x0 , v = v0
(L’instant initial est l’instant t0)
= 0
= 0
v = 0 t + v0
v - v0 = 0 (t –t0)
v²-v0² = 2 0 (x-x0)

Cinématique du point Page 3 sur 4
SI MERMOZ
Mouvement de rotation
1-Définition.
Un solide est animé d’un mouvement de rotation (autour d’un axe fixe) par rapport à un repère R si deux points de ce
solide restent fixes dans R. Ces deux points définissent l’axe de rotation.
2-Equations du mouvement.
Présentation-Paramétrage :
On considère un solide en mouvement de rotation d’axe par rapport
à . On paramètre la position du solide par l’angle de rotation.
Trajectoire :
Les trajectoires des points du solide sont des cercles centrés sur l’axe de
rotation.
Position angulaire :
: angle de rotation d’une droite quelconque liée au solide par rapport à sa position initiale
Vitesse angulaire:
w
(Unités : système international : rad/s)
Accélération angulaire:
(Unités : système international : rad/s²)
Les trois fonctions du temps sont appelées équations du mouvement.
Le mouvement est accéléré si est positif, décéléré si est négatif.
3-Mouvements particuliers.
31-Mouvement de rotation uniforme.
Le mouvement est uniforme si la vitesse angulaire est constante c’est à dire :
= 0 = constante (ou )
Equations du mouvement :
Conditions initiales :
à t = 0 , = 0 , = 0
(L’instant initial est l’instant 0)
Conditions initiales :
à t = t0 , = 0 , = 0
(L’instant initial est l’instant t0)

Cinématique du point Page 4 sur 4
SI MERMOZ
32-Mouvement de rotation uniformément varié.
Le mouvement est dit uniformément varié si l’accélération angulaire est constante c’est à dire :
= constante
Equations du mouvement :
Conditions initiales :
à t = 0, = 0, = 0
(L’instant initial est l’instant 0)
Conditions initiales :
à t = t0, = 0, = 0
(L’instant initial est l’instant t0)
Elimination du temps entre les fonctions et :
Pour un mouvement de rotation uniformément varié (avec = constante, non nulle), on a :
²- 0² = 2 ( )
4-Vitesse et accélération d’un point.
On considère un point M lié à un solide ayant un mouvement de
rotation d’axe par rapport à .
41-Position d’un point.
On a : (R étant une constante).
42-Vitesse d’un point.
donc avec
La vitesse d’un point est proportionnelle au rayon et à la vitesse angulaire, elle est tangente à la trajectoire, donc
perpendiculaire à .
43-Accélération d’un point.
On a :
Accélération tangentielle :
Est appelée accélération tangentielle
Accélération normale :
Est appelée accélération normale
(Cette accélération est toujours dirigée vers le centre).
1
/
4
100%