Traitement des images 1

1
1
Traitement
des images 1
ENSIM 4A SPMI
Année 2016/2017
http://perso.univ-lemans.fr/~smontres/ENSIM/TOI2/toi2_1617_RGB.pdf
2
Plan du cours
Perception des images, grandeurs
photométriques
Signaux bidimensionnels
Filtrage des images

2
3
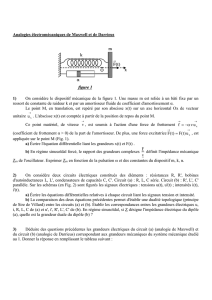
La lumière: une source de lumière se décompose comme une
somme d’ondes monochromatiques de différentes longueurs λ. On
parle alors de spectre de la lumière
• Spectre electromagnétique I
s
km
c
f
c
/
300000
=
=
λ
Perception des images,
grandeurs photométriques
4
• Spectre électromagnétique II
spectre visible
spectre complet
Perception des images,
grandeurs photométriques

3
5
Lorsque notre regard fixe un objet, les rayons lumineux réfléchis par cet objet se
focalisent sur une zone particulière de la rétine, la fovea qui est située au centre de la
macula, région jaunâtre proche du centre de la rétine, mais légèrement décalée par
rapport à l’axe optique de l’œil. La fovea correspond à la zone d’acuité maximale de
l’œil.
• Système visuel humain I
Perception des images,
grandeurs photométriques
6
La fonction optique de l’oeil est de focaliser un stimulus de couleur sur sa
partie photosensible, la rétine.
– La cornée est une membrane transparente et résistante située sur la face
avant de l’oeil.
– L’iris est une membrane colorée qui fonctionne comme un diaphragme
en contrôlant la quantité de lumière qui pénètre dans l’oeil. Son ouverture
centrale est la pupille.
– Le cristallin est une lentille biconvexe molle qui permet de focaliser le
stimulus grâce à sa capacité à modifier sa courbure.
– Le corps vitré est un liquide continuellement sécrété et absorbé, dont le
rôle est d’assurer la structure autonome de l’œil.
La rétine contient deux types de cellules photosensibles : les cônes et les
bâtonnets.
Les bâtonnets permettent la vision nocturne (vision scotopique) tandis que
les cônes permettent la vision diurne (vision photopique).
• Système visuel humain II
Perception des images,
grandeurs photométriques

4
7
La rétine possède 4 à 7 millions de
cônes pour 110 à 125 millions de
bâtonnets.
La fovea se distingue par une
concentration maximale de cônes
pour une très faible concentration en
bâtonnets. Il existe même une zone
au centre de la fovea dans laquelle il
n’y a que des cônes, la foveola.
• Système visuel humain III
Perception des images,
grandeurs photométriques
8
• Système visuel humain IV
Expérience de Mariotte (1620-1684): Mise en évidence de la
tache aveugle
Perception des images,
grandeurs photométriques

5
9
• Système visuel humain V
Les cônes et les bâtonnets ont deux fonctions différentes:
•Bâtonnets: sensibles aux formes, fonctionne même avec une
faible luminosité (vision scotopique)
•Cônes: sensibles aux couleurs et aux détails, ils ne
fonctionnent qu’a la lumière du jour (vision photopique)
L’acuité visuelle est le fait des cônes. Une vision précise
des détails n’est possible que si l’œil les fixe-> formation de
l’image au centre de la fovéa (densité maximale de cônes)
Perception des images,
grandeurs photométriques
10
• Système visuel humain VI
Pouvoir séparateur de l’œil: environ 1’
d
D
α
D
d
tg =)(
α
Exemple: avec D = 1m, α= 1’
on a d = 0.3 mm
Perception des images,
grandeurs photométriques
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%