TP Physique: 2ème Loi Newton

TP N° 8 de Physique : La deuxième loi de Newton
Objectifs :
- Tracer un vecteur vitesse sur un enregistrement, en déduire le vecteur accélération.
- Vérifier la deuxième loi de Newton.
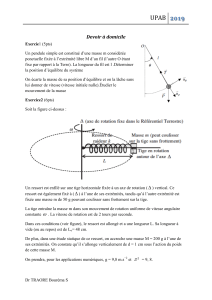
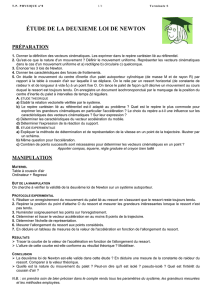
I. Le dispositif expérimental
Le mobile autoporteur se déplace sur une table traçante
qui est disposée horizontalement.
Il est relié à un point fixe O par l’intermédiaire d’un fil
et d’un ressort à spires jointives.
Le ressort est étiré puis le mobile est lancé dans une
direction perpendiculaire à OG0 (G0 étant la position du
centre d’inertie du mobile à la date t0 = 0 s).
L’enregistrement est fait avec un mobile de masse
m =1,1 kg, le ressort a une constante de raideur de k = 7,0 N.m – 1
L’enregistrement des positions a été effectué à intervalles de temps réguliers : τ = 40 ms.
Le dispositif fil + ressort a une longueur au repos de l0= 19 cm.
Toutes les droites AiGi (ex : A1G1 , A2G2…) se coupent au point O.
L’échelle de l’enregistrement est ) l’échelle 1 / 1.
Table traçante
Fil + ressort
O
G0
Gi
A0
Mobile autoporteur
Ai
II. Etude du mouvement
III.1. Le vecteur vitesse
1) Déterminer la vitesse du solide des points : G3, G5 et G7.
2) Représenter les vecteurs vitesses 753 GGG vetv,v pour les trois points G3, G5 et G7 en prenant
pour échelle 1 cm correspond à 0,10 m.s – 1.
3) Le vecteur vitesse varie-t-il au cours du mouvement ? Justifier.
III.2. Le vecteur accélération
Le vecteur accélération noté a est tel que :
G
r
1i1i
GG
G
0Δt
G
Gtt
vv
Δt
vΔ
lim
dt
vd
a1
i1i
ii
i
−+
→−
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
== −+
r
r
r
1) En utilisant la définition précédente et par une équation aux dimensions, déterminer l’unité de
l’accélération ?
2) Pour les positions 4 et 6, tracer le vecteur 4
G
vΔ
r
et 6
G
vΔ
r
où 1i1ii GGG vvvΔ−+ −
=
r
r
r
.
3) Comparer la direction et le sens du vecteur accélération G
a
r
au vecteur G
vΔ. Conclure.
4) En mesurant sur la construction graphique et en tenant compte de l’échelle utilisée, déduire la
valeur de la variation de vitesse : ΔvG.
5) Exprimer la valeur de l’accélération en fonction de Δv et τ puis déterminer la valeur de
l’accélération aG4 et aG6 pour les positions 4 et 6.
6) Représenter les vecteurs accélération 64 GG aeta aux positions 4 et 6 en précisant l’échelle
utilisée (le vecteur accélération doit apparaître le plus distinctement).

III. Etude dynamique
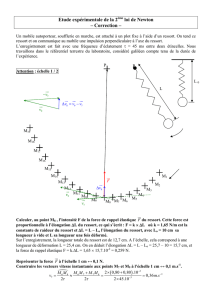
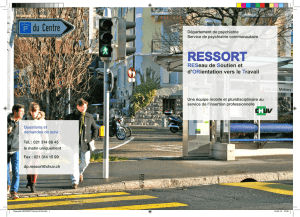
III.1. Rappel sur la force exercée par un ressort sur un solide
La force F
r
exercée par un ressort sur un solide est appelée force de rappel.
Son expression vectorielle est toujours : lΔkF ×−= où lΔest le vecteur allongement.
Les caractéristiques de cette force sont :
¾ Point d’application : le point d’attache du ressort sur le mobile
¾ direction : droite reliant les deux extrémités du ressort,
¾ sens : opposé à la déformation du ressort,
¾ valeur : proportionnelle à la déformation du ressort : F = k × Δℓ avec :
- k :
la constante de raideur du ressort, exprimée en N.m – 1
- Δℓ = │ℓ(t) – ℓ0 │: l’élongation du ressort, exprimée en m
- ℓ0 : allongement initial du ressort, exprimé en m
- ℓ(t) : allongement du ressort à l’instant t, exprimé en m
Au repos
Étirement
Compression
G
ℓ0
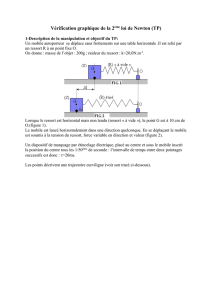
III.2. La deuxième loi de Newton
Les distances entre le point O et centre de gravité, G, du mobile autoporteur relevées pour chaque
position sont rassemblées dans le tableau ci-dessous.
Position 0 1 2 3 4 5 6 7 8 9
OGi (cm) 47,6 47,9 48,1 47,8 47,1 46,6 45 43,5 42 40,5
1) Faire le bilan des forces appliquées au système « mobile autoporteur » dans le référentiel lié à la
table traçante.
2) En déduire les caractéristiques (point d’application, direction, sens et norme) de la force résultante
notée ext
F et déterminer les normes de la force résultante )(tF 4ext et )(tF 6ext aux dates t4 et t6.
3) En appliquant la deuxième loi de Newton, déterminer la valeur de l’accélération aG4 et aG6 du
centre d’inertie du solide pour les positions 4 et 6.
4) Comparer les résultats obtenus par le calcul à ceux obtenus à l’aide de l’enregistrement et
conclure.
ℓ(t)
G
ℓ(t)
G
F
F
1
/
2
100%