Modélisation d`un haut parleur électro-dynamique

Cet article traite de la mod´
elisation et d’un haut-parleur ´
electro-dynamique. Les r´
ealisations technologiques
font que ces syst`
emes sont rarement lin´
eaires. Ces non-lin´
earit´
es sont de divers types (suspensions m´
ecaniques,
propri´
et´
es magn´
etiques, etc). Cependant, ces transducteurs partagent tous une mˆ
eme propri´
et´
e physique : en dehors
des sources, ce sont des syst`
emes passifs. Dans ce travail, nous cherchons `
a exploiter explicitement cette propri´
et´
e
et en particulier les fonctions de stockage ´
energ´
etique, pour la mod´
elisation non lin´
eaire. L’approche utilis´
ee
s’appuie sur les ”Syst`
emes `
a Hamiltoniens `
a Ports” dont nous rappelons le formalisme. Il s’agit de syst`
emes
dynamiques ouverts d´
ecrits comme des ensembles de composants stockant de l’´
energie et de composants dissipant
de la puissance, et sont munis de ports d’interconnexion au travers desquels le syst`
eme peut ´
echanger avec son
environnement. Ce formalisme pr´
eserve naturellement le comportement ´
energ´
etique des composants ´
el´
ementaires
et le bilan de leurs ´
echanges de puissance, y compris dans le cas non lin´
eaire. Ceci permet de garantir la passivit´
e
des mod`
eles `
a temps continu. Un mod`
ele non lin´
eaire, param´
etrique, `
a fonctions d’´
energie bien pos´
ees est produit
sur la base d’un dictionnaire de composants ´
el´
ementaires que nous introduisons. Ce mod`
ele sera utilis´
e pour de
futurs travaux d’estimation et de compensation des non-lin´
earit´
es d’un transducteur.
1 Introduction
Les hauts parleurs ´
electrodynamiques sont des syst`
emes
bien connus, dont l’utilisation a ´
et´
e g´
en´
eralis´
ee depuis
leur mise `
a disposition, que ce soit dans des applications
de restitution sonore (HiFi), ou comme partie int´
egrante
d’une chaˆ
ıne de mesure (contrˆ
ole non destructif, acoustique
des salles, HRTF, etc...). Cependant, ce sont des syst`
emes
complexes de par leur fonctionnement mˆ
eme (couplages
entre plusieurs domaines physiques) et les contraintes li´
ees
`
a leur fabrication. Pour toutes ces raisons, il est difficile
de pr´
evoir `
a la conception leur r´
eponse `
a des stimuli
d’amplitude variable.
Un haut parleur ´
electrodynamique est classiquement
d´
ecrit par le mod`
ele de Thiele et Small [1, 2], qui est valide
en petits signaux, c’est `
a dire lorsque le syst`
eme est sollicit´
e
dans sa zone de fonctionnement lin´
eaire. Cependant, ce
mod`
ele ne traduit pas toutes les nuances de fonctionnement
qui apparaissent lorsque le syst`
eme est utilis´
e`
a fort niveau.
Ces syst`
emes pr´
esentent plusieurs non-lin´
earit´
es inh´
erentes `
a
leur principe de fonctionnement. La mod´
elisation des effets
non lin´
eaires a ´
et´
e largement ´
etudi´
ee depuis, et plusieurs
m´
ethodes ont ´
et´
e propos´
ees : Variation des param`
etres
de Thiele et Small [10, 11, 12], s´
eries de Volterra [16]
ou de Wiener-Volterra [17], repr´
esentation d’´
etat non
lin´
eaire [19, 20]. Cependant, l’interpr´
etation physique de ces
diff´
erents mod`
eles et la pr´
eservation de la passivit´
e n’est pas
´
evidente.
Dans cet article, nous proposons un mod`
ele simplifi´
e
de la partie ´
electro-magn´
eto-m´
ecanique du haut parleur
´
electrodynamique, non lin´
eaire et `
a bilan de puissance
garanti. Ce mod`
ele est donn´
e dans le formalisme des
“Syst`
emes `
a Hamiltoniens `
a Port” et un dictionnaire
de composants physiques adapt´
es est construit. Ce
dictionnaire inclut en particulier des composants non
lin´
eaires param´
etriques, dans le but de faire de l’estimation
dans second temps. Plus pr´
ecis´
ement, la non-lin´
earit´
e de
la suspension m´
ecanique et les effets non lin´
eaires dus
au comportement du circuit ferromagn´
etique sont pris en
compte.
L’article est organis´
e de la fac¸on suivante. La section 2
rappelle le formalisme des syst`
emes `
a Hamiltoniens `
a ports.
Le mod`
ele du haut parleur est ensuite d´
etaill´
e section 3.
2 Syst`
eme hamiltoniens `
a ports
Nous pr´
esentons les bases du formalisme des Syst`
emes
`
a Hamiltoniens `
a Ports sous une forme adapt´
ee `
a notre objet
d’´
etude (voir [3, 4, 5] pour une description plus d´
etaill´
ee).
Nous en donnons une illustration sur un exemple simple.
2.1 Formalisme
Un syst`
eme ouvert passif de dimension finie (syst`
emes
´
electroniques, de m´
ecanique du solide, etc) peut g´
en´
eralement
ˆ
etre d´
ecrit par un ensemble de nScomposants stockants
(condensateurs et bobines, masses et ressorts, etc), nD
composants dissipatifs (r´
esistances et diodes, amortissements
fluides et frottements solides, etc) et nPports de connexion
qui permettent des ´
echanges avec l’ext´
erieur (fils, points
d’action/r´
eaction, etc).
L’´
energie de chaque composant stockant est exprim´
ee
comme une fonction d´
efinie positive d’un ´
etat appropri´
e
Hs(ηs)=Es≥0 (typiquement, pour une masse m, l’´
etat
ηpeut ˆ
etre choisie comme la quantit´
e de mouvement
et H(η)=η2
2.m). De mˆ
eme, la puissance dissip´
ee par
chaque composant dissipatif est exprim´
ee comme une
fonction positive d’une variable appropri´
ee Dd(ωd)≥0
(typiquement, pour un amortissement fluide a, la variable
ωpeut ˆ
etre choisie comme la vitesse vet D(v)=a.v2). La
puissance entrante sur chaque port est not´
ee P
p.
Pour chaque domaine consid´
er´
e (voir table 1), on choisit
deux quantit´
es, appel´
ees respectivement flux f et effort e,
dont le produit donne la puissance rec¸ue par les composants
(stockants ou dissipatifs) et par le syst`
eme complet via les
ports (convention r´
ecepteur). Pour les composants stockants,
les variables d’effort et de flux peuvent ˆ
etre reli´
ees aux
quantit´
es dηs
dt et dHs
dηspuisque leur produit fournit la puissance
rec¸ue ( fs.es=dEs
dt =dHs
dηs.dηs
dt ) : dans le cas de la masse,
F=m.dv
dt =dη
dt et v=η
m=dH
dη. Pour les composants
dissipatifs, la fonction de dissipation est factoris´
ee en
Dd(ωd)=fd.ed=ωd.zd(ωd) : pour l’amortissement,
F=a.v=z(ω). Pour les ports, les efforts et les flux sont
r´
epartis et organis´
es dans deux vecteurs uet y, port par port,
de sorte que up.yp=fp.ep=P
p. Dans cette r´
epartition, on
consid`
ere ucomme une entr´
ee et ycomme une sortie du
syst`
eme.
En exprimant et combinant les relations entre les efforts
et les flux pour un le syst`
eme consid´
er´
e (application des lois

de Kirchhoff, bilans des forces, etc), on obtient les ´
equations
qui gouvernent le syst`
eme. Ces ´
equations prennent la forme
d’un syst`
eme dit “`
a Hamiltonien `
a Ports” [5, (´
eq. 2.53)], not´
e
dans la suite SHP
dη
dt
ω
−y
=
Jη−K Gη
KTJwGω
−GT
η−GT
ωJy
.
∇H(η)
z(ω)
u
,(1)
o`
u les matrices Jη,Jω,Jysont antisym´
etriques (JT=−J).
∇H :RnS→RnSd´
enote le gradient de l’´
energie totale E=
H(η)=PnS
s=1Hs(ηs) par rapport au vecteur d’´
etat [η]s=ηs.
La fonction z:RnD→RnDexprim´
ee sur le vecteur ω∈RnD
rassemble toutes les fonctions zd(ωd) de sorte que z(ω)T
.ω=
PnD
d=1Dd(ωd) soit la puissance dissip´
ee par l’ensemble du
syst`
eme. La puissance totale entrant le syst`
eme est P
S=
uT.y=PpPp. On v´
erifie imm´
ediatement que cette structure
garantit le bilan de puissance. En effet, le calcul de dE
dt en
exploitant (1) montre que
dE
dt +D−P
S=
∇H(η)
z(ω)
u
T
.
dη
dt
ω
−y
=0.(2)
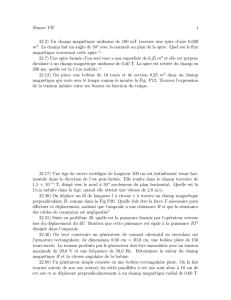
2.2 Exemple illustratif
Consid´
erons le syst`
eme d´
ecrit en figure 1 avec les choix
adapt´
es suivants. Pour le ressort r, l’´
etat est son ´
elongation
a
x
Fk
Fa
Fu
Fm
k
m
Figure 1 – Syst`
eme masse m, raideur lin´
eaire kret
amortissement a(sans champ de pesanteur). La position
relative de la masse par rapport `
a l’´
equilibre est not´
ee x.
η1=xret l’´
energie (potentielle) est d´
ecrite par H1(η1)=
1
2.kr.η2
1o`
ukrest la raideur. Pour la masse m, on reprend
le mˆ
eme choix que pr´
ec´
edemment : l’´
etat est la quantit´
e de
mouvement η2=m.vmet l’´
energie (cin´
etique) est d´
ecrite par
H2(η2)=1
2.mη2
2. Pour l’amortissement, on reprend aussi le
mˆ
eme choix que pr´
ec´
edemment : ω1=vaavec z1(ω1)=
a.ω1. Pour le port, l’entr´
ee est la force ext´
erieure appliqu´
ee `
a
la masse u=Fext et la sortie est la vitesse associ´
ee y=vext.
En ´
ecrivant le bilan des forces et ´
egalant les vitesses des
diff´
erents composants connect´
es, on trouve que
˙xr
m.˙vm
va
−vext
=
0+100
−1 0 −1+1
0+100
0−100
.
Fk
vm
Fa
Fext
,(3)
ce qui correspond exactement `
a la structure (1), bloc par bloc.
2.3 Choix des variables de puissance
On a vu en section 2.1 qu’un choix adapt´
e de variables
d’effort et de flux pour le domaine m´
ecanique correspond
`
a la force et la vitesse. Dans le domaine ´
electrique, on
utilisera le courant et la tension [6]. Dans le domaine
magn´
etique, on utilisera la repr´
esentation gyrateur-capacit´e
dont l’interpr´
etation ´
energ´
etique est directe (voir [13, 14]
pour une description compl`
ete). L’ensemble des choix faits
est r´
esum´
e dans le tableau 1.
Tableau 1 – Choix des variables de flux et d’effort
consid´
er´
es pour les domaines de la m´
ecanique, de
l’´
electronique et du magn´
etisme.
Domaine Flux Effort
M´
ecanique Vitesse : v[m.s−1] Force : F[N]
´
Electrique Courant : i[A] Tension : υ[V]
Magn´
etique Variation de flux force magn´
eto-
magn´
etique ˙
φ[V] motrice (fmm) ξ[A]
Nous donnons ci-dessous un bref rappel pour la
description macroscopique du magn´
etisme qui sera utilis´
ee
dans la suite. Un champ magn´
etique est habituellement d´
ecrit
par deux champs compl´
ementaires : le champ d’excitation h
et le champ d’induction b=M0(h)+M(h). Ce dernier est la
superposition de la magn´etisation du vide M0=µ0.ho`
uµ0
est la perm´
eabilit´
e magn´
etique du vide et de la magn´etisation
du mat´eriau M, caract´
eris´
ee par la moyenne statistique (`
a
une ´
echelle macroscopique) de moments magn´
etiques
microscopiques. En l’absence d’un champ d’excitation, les
orientations `
a l’´
echelle microscopique sont uniform´
ement
r´
eparties de sorte que M=0. Avec l’augmentation du champ
appliqu´
e, les moments s’orientent progressivement sur h
jusqu’`
a atteindre une saturation lorsque tout les moments
sont localement colin´
eaires au champ. On consid`
ere h
constant sur une ligne de champ, bconstant sur une section
d’un circuit magn´
etique, et on d´
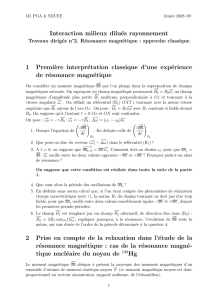
efinit [13, 14]
•la force magn´etomotrice (fmm) ξ=HCh.dl =l.het
•le flux d’induction magn´etique φ=!Sb.dS =S.b,
o`
u les variables let Ssont d´
efinies en figure 2.
˙
ϕ
l
S
i
ν
N
˙
ϕg
lg
Sg
Figure 2 – Sch´
ematisation d’un circuit magn´
etique. lest la
longueur moyenne des lignes de champs et Sla surface
moyenne embrass´
ee par le champ d’induction b.

3 Dictionnaire de Composants
La membrane d’un haut parleur ´
electrodynamique est
mise en mouvement sous l’action des forces de Laplace, dues
`
a la variation de la tension aux bornes de la bobine plong´
ee
dans un champ magn´
etique g´
en´
er´
e par un aimant permanent.
Trois domaines physiques sont donc explicitement pris en
compte : ´
electrique, m´
ecanique et magn´
etique. Nous ne
mod´
elisons ni le rayonnement acoustique, ni les effets de
la temp´
erature sur le fonctionnement global. Cependant, le
syst`
eme est termin´
e par un port m´
ecanique (force et vitesse
de la membrane), sur lequel on peut connecter une charge
acoustique de complexit´
e variable.
Nous d´
etaillons tout d’abord les ph´
enom`
ene de stockage
et de dissipation d’´
energie dans le domaine magn´
etique.
Ensuite, le mod`
ele param´
etrique des deux non lin´
earit´
es
trait´
ees (suspension et circuit magn´
etique) est donn´
e.
Finalement, l’ensemble et connect´
e au travers de gyrateurs
pour donner le mod`
ele complet sous la forme d’un SHP.
3.1 Circuit magn´
etique
Dans la suite, on n´
eglige la magn´
etisation du vide : h≡
h(b). La variation de la densit´
e d’´
energie stock´
ee sous la
forme d’un champ magn´
etique est alors ˙
E=h(b).˙
b[8]. La
variation d’´
energie totale est donc donn´
ee par
$V
˙
EdV =S.l.h(b).˙
b=ξ. ˙
φ=∇H(η).˙η, (4)
avec η=φet ∇H(η)=S.l.hη
S=ξ.
3.2 Pertes par hyst´
er´
esis dans les ferro-
magn´
etiques
Sans champ d’excitation magn´
etique appliqu´
e, les
lignes de champs se ferment pr´
ef´
erablement `
a l’int´
erieur
du mat´
eriau, de telle sorte qu’un ´
echantillon se divise
spontan´
ement `
a l’´
echelle m´
esoscopique en un grand nombre
de r´
egions de magn´
etisation uniforme, appel´
es les domaines
de Weiss, s´
epar´
e par de tr`
es fines zones de transition, les
parois de Bloch (voir [7, §2]). [7, §2.3] La magn´
etisation
des ferromagn´
etiques implique le d´
eplacement des parois de
Bloch qui d´
elimitent les domaines de Weiss. La r´
eversibilit´
e
du processus de magn´
etisation des ferromagn´
etiques est
conditionn´
e par la pr´
esence d’impuret´
es dans le r´
eseau
cristallin du mat´
eriau, qui constituent de microscopiques
vides magn´
etique. L’´
energie magn´
etique totale ´
etant plus
faible lorsque ces vides sont situ´
es sur les parois de Bloch
que lorsqu’elles sont dans les domaines, chaque mur
aura tendance `
a rester en position fixe correspondant `
a
un minimum d’´
energie magn´
etique. Lors des phases de
magn´
etisation/d´
emagn´
etisation, les murs sautent d’une
position `
a l’autre, ce qui se traduit par l’irr´
eversibilit´
e du
processus et l’apparition d’un cycle d’hyst´
er´
esis dans la
courbe h(b) Dans la mesure o`
u toute l’´
energie perdue est
convertie en chaleur, ce ph´
enom`
ene est bien d´
ecrit par
une force de type frottement visqueux , de coefficient κ, de
puissance associ´
ee
P
κ=−κ|˙
M|=−κ
S˙
φ(5)
Figure 3 – Vue sch´
ematique d’un haut parleur
´
electrodynamique.
3.3 Param´
etrisation des fonctions de stockage
non lin´
eaires
Les principales non-lin´
earit´
es apparaissant dans le
syst`
eme sont dues `
a la suspension de l’´
equipage mobile
(raideur non-lin´
eaire) et au comportement du mat´
eriau
constituant le circuit magn´
etique. On fait une repr´
esentation
param´
etrique id´
ealis´
ee qui respecte le bilan de puissance.
On choisit des fonctions impaires (sym´
etriques) comme
relations ∇Hk(x)=F(x) et ∇H(φ)=S.l.hφ
S. Pour
les besoins de l’estimation, les courbes de saturation c(x)
sont construites par combinaison lin´
eaire de fonctions de
bases, en assurant la lin´
earit´
e d’une partie du syst`
eme par
rapport aux param`
etres α:c(η)=α0.c0(η)+αsat.csat η
ηsat ,
avec comme contraintes : c0(η) pilote le comportement
lin´
eaire autours de l’origine et csat(η) d´
ecrit le ph´
enom`
ene
de saturation, ne participe pas au comportement lin´
eaire
de c(η) et est normalis´
ee en 1
2. On choisit c0(η)=η
et csat(η)=4
4−π.tan( π.η
2)−π.η
2. L’´
energie associ´
ee est
H(η)=Rη
0c(˜η)d˜η=α0.H0(η)+αsat.Hsat η
ηsat , avec
H0(η)=η2
2et Hsat(η)=−8.ηsat
π(4−π).ln cos π.η
2+π2
8.η2. On
v´
erifie que H(η)≥0, ∀(α0, αsat)∈R+
∗×R+
∗. On donne
la d´
eriv´
ee seconde du hamiltonien pour la simulation :
∂2
ηH(η)=α0+2.π.αsat
ηsat .(4−π).tan2π.η
2.ηsat
Figure 4 – Courbes c(η) et H(η) pour α0=1, αsat =0.1 et
ηsat =1.

Tableau 2 – Dictionnaire de composants ´
el´
ementaires dans chaque domaine consid´
er´
e.
Stockage Diagram ´
Etat ηFonction de stockage E=H(η) Effort eFlux f
Masse m.v1
2.m.η2˙η∇H(η)
Raideur non
lin´
eaire xαk,0.H0(η)+αk,sat.Hsat η
xsat ∇H(η) ˙η
Ferromagn´
etique φ αφ,0.H0(η)+αφ,sat.Hsat η
φsat ∇H(η) ˙η
Entrefer φle
2.µ0.µr.Se.η2∇H(η) ˙η
Dissipations Diagram ´
Etat ωPuissance dissip´
ee D(ω)=z(ω).ω Effort eFlux f
Amortissement
fluide v=˙x a.ω2z(ω)ω
Hyst´
er´
esis
magn´
etique ˙
φ κ.|˙
φ|z(ω)ω
Couplages Diagram Diagram
Induction υ
i!= 0N
1
N0!. ξ
˙
φ!
Force de Laplace vc
Fc!= 01
b.lc
b.lc0!. ic
υc!
3.4 Couplages
3.4.1 ´
Electromagn´
etiques
Le th´
eor`
eme d’Amp`
ere relie la circulation du champ
d’excitation le long d’une ligne de champ d’induction `
a la
somme des courants alg´
ebriques qui traversent la surface
circonscrite : ξ=N.i. La loi de Lenz-Faraday relie la
variation de flux magn´
etique dans un sol´
eno¨
ıde `
a la force
´
electromotrice appliqu´
ee `
a ses bornes : dφ
dt =1
N.υ. L’´
egalit´
e
des puissance dans chaque domaine assure le caract`
ere
conservatif de l’interconnexion : υ.i=˙
φ.ξ. Un bobinage de
Ntours `
a noyau ferreux est donc mod´
elis´
e par un gyrateur
[13, 14] :
υ
i!= 0N
1
N0!. ξ
˙
φ!.(6)
3.4.2 ´
Electrom´
ecanique
On consid`
ere un conducteur de section Scet de longueur
Lc, soumis `
a une tension υc, en mouvement `
a la vitesse vcde
direction constante dans un champ d’induction borthogonal
`
avc. On exprime le courant parcourant ce conducteur `
a partir
de la distribution volumique de charge ρqse d´
eplac¸ant `
a la
vitesse vqcomme ic=!ρq.vq.dS c. Alors, un ´
el´
ement de
conducteur de longueur dl est soumis `
a la force de Laplace
dFL=ρq.Sc.dl.(vq+vc)×b. Cette force est orthogonale
`
a la vitesse vq+vf, la puissance associ´
ee est donc nulle :
dPL=FL.(vq+vf)=0. En int´
egrant cette relation sur la
longueur totale du conducteur, on obtient que
PL=vc.(b.lc.ic)+ic.(vc.lc.b)
=vc.Fc−ic.υc=0(7)
Ce que l’on r´
esume par
vc
Fc!= 01
b.lc
b.lc0!. ic
υc!.(8)
3.5 Mod`
ele complet
Le circuit magn´
etique repr´
esent´
e en figure 5 est mod´
elis´
e
par
˙
φi
˙
φκ
−iB
−˙
φA
=
0 0 +1
N0
0 0 +1
N0
−1
N−1
N0−1
N
0 0 1
N0
.
ξi
ξκ
υB
ξA
,(9)
Finalement, le mod`
ele complet du transducteur est donn´
e
par
˙
φi
Fm
vk
˙
φκ
va
−iB
−˙
φA
−vac
=
.−b.l
N. . . 1
N. .
b.l
N.−1b.l
N−1.b.l
N−1
.1. . . . . .
.−b.l
N. . . 1
N. .
.1. . . . . .
−1
N. . −1
N. . −1
N.
.−b.l
N. . . 1
N. .
.1. . . . . .
ξi
vm
Fk
ξκ
Fa
υB
ξA
Fac
(10)

Figure 5 – Mod`
ele de circuit magn´
etique `
a une dimension.
Figure 6 – Mod`
ele du haut-parleur transpos´
e dans le
domaine ´
electrique.
o`
u les points correspondent `
a des z´
eros.
4 Conclusions
Dans cet article, la partie ´
electro-magn´
eto-m´
ecanique
d’un haut parleur ´
electrodynamique a ´
et´
e mod´
elis´
ee dans le
cadre des Syst`
emes `
a Hamiltonien `
a Ports, qui garantissent
un bilan de puissance bien pos´
e. Ce mod`
ele inclut des non-
lin´
earit´
es ”type” pour la suspension m´
ecanique, le stockage
magn´
etique et les ph´
enom`
enes d’hyst´
er´
esis magn´
etique.
Pour cela un dictionnaire de composants ´
el´
ementaires a
´
et´
e construit. Ces composants sont mod´
elis´
es `
a partir de
fonctions d’´
energie ou de dissipation param´
etriques dans des
espaces de configuration adapt´
es. Une attention particuli`
ere
a´
et´
e port´
ee sur la positivit´
e de ces fonctions et leur lin´
earit´
e
en les param`
etres, except´
e pour un ”param`
etre de saturation”.
En premi`
ere perspective, ceci sera exploit´
e pour la mise au
point d’une future m´
ethode d’estimation des param`
etres.
Deux autres perspectives concernent la simulation du mod`
ele
`
a passivit´
e garantie et son utilisation pour la compensation
des non-lin´
earit´
es du transducteur.
Remerciements
Ce travail a ´
et´
e men´
e dans le cadre du projet ANR
HamecMopSys. La th`
ese d’Antoine Falaize est financ´
ee par
l’ ´
Ecole Doctorale EDITE.
R´
ef´
erences
[1] Thiele, N. (1971). Loudspeakers in vented boxes : Part
1. Journal of the Audio Engineering Society, 19(5),
382-392.
[2] Thiele, N. (1971). Loudspeakers in vented boxes : Part
2. Journal of the Audio Engineering Society, 19(6),
471-483.
[3] Maschke, B. M., Van der Schaft, A. J., & Breedveld,
P. C. (1992). An intrinsic Hamiltonian formulation of
network dynamics : Non-standard Poisson structures
and gyrators. Journal of the Franklin institute, 329(5),
923-966.
[4] Van der Schaft, A. J. (2006). Port-Hamiltonian
systems : an introductory survey. Proceedings of the
International Congress of Mathematicians (3) : Invited
Lectures, 1339-1365.
[5] Stramigioli, S., Duindam, V., & Macchelli, A. (2009).
Modeling and Control of Complex Physical Systems :
The Port-Hamiltonian Approach. Springer.
[6] Falaize-Skrzek, A., & H´
elie, T. (2013, October).
Simulation of an analog circuit of a wah pedal : a port-
Hamiltonian approach. In Audio Engineering Society
Convention 135. Audio Engineering Society.
[7] Henrotte, F., Nicolet, A., & Hameyer, K. (2006). An
energy-based vector hysteresis model for ferromagnetic
materials. COMPEL : The International Journal for
Computation and Mathematics in Electrical and
Electronic Engineering, 25(1), 71-80.
[8] Franc¸ois-Lavet, V., Henrotte, F., Stainer, L., Noels,
L., & Geuzaine, C. (2011). Vectorial incremental
nonconservative consistent hysteresis model. In
Proceedings of the 5th International Conference on
Advanded COmputational Methods in Engineering
(ACOMEN2011).
[9] Ravaud, R., Lemarquand, G., Lemarquand, V., &
Roussel, T. (2010). Ranking of the nonlinearities of
electrodynamic loudspeakers. Archives of Acoustics,
35(1), 49-66.
[10] Klippel, W. (1990). Dynamic measurement and
interpretation of the nonlinear parameters of
electrodynamic loudspeakers. Journal of the Audio
Engineering Society, 38(12), 944-955.
[11] Klippel, W. (2006). Tutorial : Loudspeaker
nonlinearities—causes, parameters, symptoms. Journal
of the Audio Engineering Society, 54(10), 907-939.
[12] Ravaud, R., Lemarquand, G., Lemarquand, V., &
Roussel, T. (2010). Ranking of the nonlinearities of
electrodynamic loudspeakers. Archives of Acoustics,
35(1), 49-66.
[13] Hamill, D. C. (1993). Lumped equivalent circuits of
magnetic components : the gyrator-capacitor approach.
IEEE transactions on power electronics, 8(2), 97-103.
 6
6
1
/
6
100%