1 Mesure de la composante horizontale du champ magnétique

MP1 Lycée Janson de Sailly Corrigé du DM n°7
Corrigé du DM n°7
1 Mesure de la composante horizontale du
champ magnétique terrestre
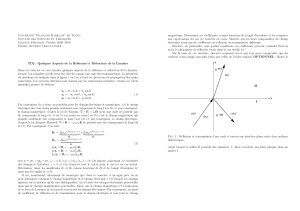
1) Localement au voisinage de la surface terrestre (sol), la verti-
cale est selon le vecteur −→
eret l’horizontale selon le vecteur −→
eθ,
comme indiqué sur la figure ci-dessous :
Direction nord sol Direction sud
−→
er
−→
eθ
−→
B(M)
−→
Bh
Il faut faire attention au fait que, dans l’hémisphère nord θP∈
[0, π/2], donc cos(θP)>0et sin(θP)>0, ce qui conduit à deux
composantes Br<0et Bθ<0. Ainsi, la composante horizontale
Bhdu champ magnétique (que l’on prendra positive Bh>0)
est égale à −Bθet elle est bien dirigée vers le nord magnétique
(qui correspond à θ= 0). De plus, le champ magnétique local est
dirigé vers le sol.
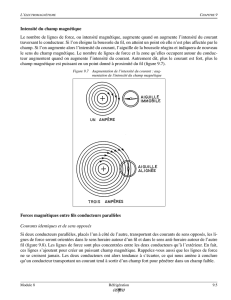
Le schéma ci-dessous indique la situation de la boussole vue du
dessus. Celle-ci tourne autour de l’axe vertical Gz passant par
son barycentre G, l’angle de rotation étant α:
y•G
x
−→
eθ
−→
Bh
−→
M
Boussole
α
−→
ex
−→
ey•
−→
ez
On sait que les positions d’équilibre de la boussole corres-
pondent au cas où le moment magnétique est aligné avec le champ
magnétique. Dans le cas d’une boussole avec un axe de rotation
vertical, il faut que celle-ci soit alignée avec la composante hori-
zontale : −→
Bh= +µ0MT
4π
sin θP
R3−→
ex
Cependant, afin d’étudier la stabilité de l’équilibre, il vaut mieux
utiliser l’énergie potentielle magnétique du dipôle qui s’écrit :
Ep=−−→
M.−→
B=−−→
M.−→
Bh=−−→
M. µ0MT
4π
sin θP
R3−→
ex
=−µ0MT
4π
sin θP
R3Mcos(α)
d’où :
Ep=−µ0MMT
4π
sin θP
R3cos α
Pour θPfixé, Epest une fonction de l’angle α. Les positions
d’équilibre correspondent à un minimum de Epvis à vis de αce
qui correspond à α= 0.
2) Utilisons le théorème du moment cinétique. La boussole tourne
autour d’un axe vertical Gz passant par son barycentre G. Son
moment cinétique s’écrit J˙α−→
ez. Les moments des actions au-
quelles elle est soumise s’écrivent :
•Force magnétique :
−→
ΓG=−→
M∧−→
B=−→
M∧(Bh−→
ex+Bv−→
ez)
=−MBhsin α−→
ez+Bv−→
M∧−→
ez
| {z }
⊥−→
ez
•−−→
MG(poids) = −−→
GG ∧m~g =~
0.
•Pivot parfaite donc −−→
MG(pivot) = ~
0.
1

MP1 Lycée Janson de Sailly Corrigé du DM n°7
Le théorème du moment cinétique en projection sur −→
ezconduit
à :
J¨α=−MBhsin α⇐⇒ ¨α+MBh
Jsin α= 0
avec : Bh=µ0MT
4π
sin θ
R3et M=k−→
Mk.
3) Pour de petites oscillations, sin α≈α. On obtient un oscillateur
harmonique de pulsation propre ω=rMBh
Jet donc de période :
T0=2π
ω= 2πsJ
MBh
4) On obtient les deux périodes τ1et τ2en remplaçant à partir du
résultat de la question précédente, en remplaçant Bhpar Be+Bh
puis par Be−Bh. On obtient donc :
τ1= 2πsJ
M(Be+Bh)et τ2= 2πsJ
M(Be−Bh)
d’où :
τ1
τ2
=sBe−Bh
Be+Bh
=⇒Bh=Be
1−τ1
τ22
1 + τ1
τ22
5) Application numérique : Bh= 24 µT.
6) On a :
Bh=µ0MT
4π
sin θP
R3d’où MT=4πBhR3
µ0sin θP
A.N. : MT= 8,3.1022 A.m2
L’intensité du champ magnétique terrestre s’écrit :
k−→
Bk=µ0MT
4π R3p4 cos2θ+ sin2θ=µ0MT
4π R3p2 cos2θ+ 1
Elle est maximale aux pôles Nord et Sud magnétiques et mini-
male à l’équateur magnétique (θ=π/2). On a donc :
k−→
Bkmax =√3µ0MT
4π R3et k−→
Bkmin =µ0MT
4π R3
ce qui donne : k−→
Bkmin = 32 µT et k−→
Bkmax = 55 µT.
2 Expérience de Stern et Gerlach
1)
v0=s2Ec
m=s2EcNA
M(Li)=2,8 ×106m.s−1
2) On sait que la force magnétique peut s’écrire, si −→
Mest constant :
−→
Fm=−−−→
grad Ep=−−→
grad(MzBz) = Mza−→
ez
Il s’agit d’une force constante. La projection du principe fonda-
mental de la dynamique sur les vecteurs de base conduit à :
¨x= 0
¨z=Mza
m
=⇒
x(t) = v0t
z(t) = Mza t2
2m
d’où par élimination de t:
z=Mza x2
2mv02=Mza x2
4Ec
On a aussi y= 0 à tout instant.
2

MP1 Lycée Janson de Sailly Corrigé du DM n°7
3) La trajectoire est ensuite rectiligne uniforme avec la vitesse ac-
quise à la sortie de la zone où règne le champ magnétique, c’est
à dire en x=`. En x=`, la vitesse vaut :
−→
v=
v0
Mza`
mv0
d’où en changeant l’origine des temps et en convenant que t= 0
lorsque x=`
x(t) = v0t+`
z(t) = Mza` t
mv0
+z(`)
Au moment de l’impact, x=`+Ddonc t=D/v0, ce qui im-
plique :
z0=Mza` D
mv2
0
+z(`) = Mza` D
2Ec
+Mza `2
4Ec
soit :
z0=Mza `
2EcD+`
2
4) Il y a seulement deux valeurs possibles pour Mzet elles sont
opposées. Les valeurs de Mzsont donc quantifiées.
5) Application numérique : Mz=±9,55.10−24 A.m2.
6) Aux deux valeurs possibles de Mzcorrespondent deux valeurs
possibles de Sz, qui valent numériquement :
Sz/~=±0,5
On trouve donc que le spin de l’électron vaut donc ±1/2.
3
1
/
3
100%