Chap I RDM - CEFA Montelimar

Calcul de Structure
BTS
1
SCBH Année 2011/2012
1
C
CH
HA
AP
P.
.
I
I
:
:
E
EQ
QU
UI
IL
LI
IB
BR
RE
E
S
ST
TA
AT
TI
IQ
QU
UE
E
I.
RAPPELS ...................................................................................................................................................... 2
I.A.
N
OTION DE FORCE
.................................................................................................................................... 2
I.A.1. Forces statiques ..................................................................................................................................... 2
I.A.2. Décomposition d'une force .................................................................................................................... 2
I.A.3. Composition de deux forces ................................................................................................................... 3
I.A.4. Notion de couple de force ...................................................................................................................... 3
I.B.
N
OTION DE MOMENTS
.............................................................................................................................. 3
I.B.1. Moment statique .................................................................................................................................... 3
I.B.2. Moment nul ............................................................................................................................................ 3
I.B.3. Moment d'un couple .............................................................................................................................. 4
I.B.4. Forces obliques ..................................................................................................................................... 4
I.C.
N
OTION DE TORSEURS
.............................................................................................................................. 4
I.C.1. Torseur associé ..................................................................................................................................... 4
I.C.2. Exemple ................................................................................................................................................. 5
I.D.
N
OTION DE LIAISONS
............................................................................................................................... 6
I.D.1. Réactions d'appui .................................................................................................................................. 6
I.D.2. Modélisation des liaisons ...................................................................................................................... 6
I.E.
M
ODELISATION DES ACTIONS MECANIQUES
............................................................................................. 7
I.E.1. Actions mécaniques à distance .............................................................................................................. 7
I.E.2. Actions mécaniques de contact : Action d'un solide sur un autre solide ............................................... 7
I.E.3. Actions mécaniques dans les liaisons entre solides ............................................................................... 8
I.E.4. Principe des actions mutuelles .............................................................................................................. 9
I.F.
I
SOLEMENT D
'
UN SYSTEME DE SOLIDE
...................................................................................................... 9
II.
EQUILIBRE STATIQUE....................................................................................................................... 11
II.A.
P
RINCIPE FONDAMENTAL DE LA STATIQUE
............................................................................................. 11
II.A.1. Théorème de la résultante : ................................................................................................................ 11
II.A.2. Théorème du moment résultant : ........................................................................................................ 11
II.B.
R
ESOLUTION D
'
UN PROBLEME DE STATIQUE
........................................................................................... 11
II.B.1. Exemple 1 :......................................................................................................................................... 12
II.B.2. Exemple 2 :......................................................................................................................................... 13

Calcul de Structure
BTS
1
SCBH Année 2011/2012
2
I. R
APPELS
I.A. N
OTION DE FORCE
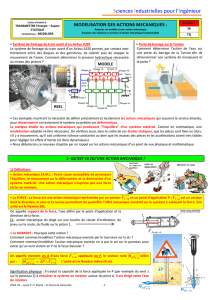
Une force F, représentée par un vecteur, est
caractérisée par :
Sa droite d’Action
Son sens
Son intensité
L'intensité de la force est définie par la longueur du
vecteur.
Une force qui ne rencontre pas d'opposition
engendre un mouvement linéaire.
L'Unité de force est le Newton
1 N = 1 kg ×
××
× 1 m ×
××
× 1 s
2
Chaque force symbolise un effort, qui appliqué en
un point P, peut être une compression ou une
traction.
I.A.1. Forces statiques
Si plusieurs forces, appliquées en un même point, se font équilibre le système est
statique (≠ mouvement).
I.A.2. Décomposition d'une force
Une force F peut être décomposée en deux forces si l'on connaît leur droite d'action
(détermination à l'aide d'un parallélogramme). On appellera alors "composantes" les
nouvelles forces obtenues (F
1
& F
2
).
Droite
d’action
F
100 daN
Compression
Traction
P
F
F
1
F
2

Calcul de Structure
BTS
1
SCBH Année 2011/2012
3
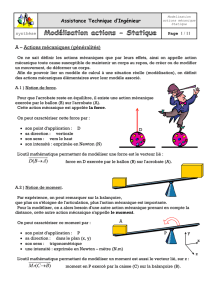
I.A.3. Composition de deux forces
A l'inverse, les forces F1 et F2 sont composées en une force, appelée R pour "résultante".
I.A.4. Notion de couple de force
Un couple de forces est composé de deux forces parallèles, de même intensité mais de
sens contraire.
I.B. N
OTION DE MOMENTS
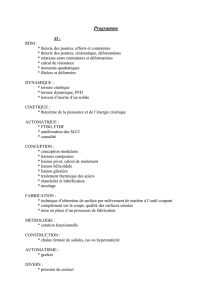
Un moment (Mt) est constitué par une force qui agit
à angle droit sur un bras de levier. C'est le produit
de cette force (en N), par le bras de levier (en m).
Il s'exprime donc en mN.
Le moment peut être :
- Positif (la force F
1
tend à faire pivoter le bras
de levier autour du point de rotation dans le
sens trigo (antihoraire))
- Négatif (la force F
2
tend à faire pivoter le bras
de levier autour du point de rotation dans le
sens horaire)
I.B.1. Moment statique
Si plusieurs moments appliqués au même point s'annulent, le système est statique; on a
alors :
(F
1
.D
1
) – (F
2
.D
2
) = 0
F
1
.D
1
= F
2
.D
2
I.B.2. Moment nul
Quand la droite d'action de la force passe par le point de rotation, le bras de levier est
égal à zéro, le moment est donc nul : F ×
××
× 0 = 0
Point de rotation
Distance D
Distance D
F
2
F
1
F
2
F
1
R

Calcul de Structure
BTS
1
SCBH Année 2011/2012
4
I.B.3. Moment d'un couple
Un couple se composant de deux forces de même intensité et de sens contraire, le
moment d'un couple est donc égal à : F.D (D étant la distance séparant les deux forces
du couple).
I.B.4. Forces obliques
Si une force agit "obliquement" sur un bras de levier, il faut déterminer le moment réel.
Il existe deux méthodes :
1) en décomposant la force F en C
1
et C
2
, on obtient une force dont la droite
d'action passe par le point de rotation (donc moment nul) et une force
perpendiculaire au bras de levier, qui permet de calculer la valeur du moment
de F.
2) en traçant une perpendiculaire à la force F passant par le point de rotation, on
obtient une nouvelle distance D
1
.
I.C. N
OTION DE TORSEURS
I.C.1. Torseur associé
Un système de forces est un ensemble de forces. Le torseur associé à un système de
force comprend les éléments de réduction suivants :
- la résultante du torseur : somme vectorielle des vecteurs forces
- le moment résultant du torseur : moment résultant des vecteurs forces par rapport
à un point.
On décompose la résultante et le moment du torseur du système de forces sur les axes
YX
,
et
Z
. On peut donc écrire le torseur sous la forme suivante :
{ }
A
Z
Y
X
Z
Y
X
A
orcesSystèmedef
M
M
M
R
R
R
T
=
Avec :
R
X
: projection de la résultante du torseur du système de forces sur l'axe
X
en N
R
Y
: projection de la résultante du torseur du système de forces sur l'axe
Y
en N
R
Z
: projection de la résultante du torseur du système de forces sur l'axe
Z
en N
M
X
: projection du moment du torseur au point A sur l'axe
X
en N.m
M
Y
: projection du moment du torseur au point A sur l'axe
Y
en N.m
M
Z
: projection du moment du torseur au point A sur l'axe
Z
en N.m

Calcul de Structure
BTS
1
SCBH Année 2011/2012
5
Remarque :
Dans le cas de structures planes chargées dans leur plan, le torseur du système de forces
comporte 3 composantes nulles :
{ }
A
Z
Y
X
A
orcesSystèmedeF
M
R
R
T
=0
0
0
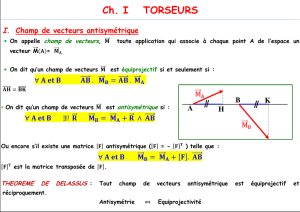
I.C.2. Exemple
Expression du torseur du système de forces par rapport au point A :
La structure est plane et est chargée dans son plan. La résultante du torseur se
détermine en projetant les forces sur les axes
X
et
Y
. Le moment résultant du torseur
correspond au moment des forces par rapport au point A en projection sur
Z
.
On obtient le résultat suivant :
{ }
A
A
orcesSystèmedeF
FhVlPl
PFV
F
T
−+−
−+= ..2..4.
0
0
0
.2
.2
Expression du torseur du système de forces par rapport au point B :
On trouve le résultat suivant :
{ }
B
B
orcesSystèmedeF
lFVl
PFV
F
T
−
−+= ..2
0
0
0
.2
.2
h
h
l
l
F
P
F
2.V
F
A
B
C
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%