Calcul de la force musculaire en temps-réel basé sur la

Polytechnique Montréal
1. Introduction
3. Méthodes
4. Résultats
Mireille Larouche Guilbert ( mireille.larouche-guilbert@polymtl.ca )
et Olivier Barron ( olivier[email protected] )
Laboratoire de Design, Apprentissage Machine et Optimisation de systèmes mécatroniques
Polytechnique de Montréal
Résumé
2. Objectif
Système multi-corps
du bras
Données
électromyographiques
Références
Fonctions critiques
Logiciel
sans
optimisation
Logiciel
avec
optimisation
Cinématique
inverse 0,4 ms
0,4
ms
Optimisation global +
Hill
Model
10,2
ms
0,4
ms
Total
10,3
ms
0,8
ms
Tableau 4.1 : Temps d’exécution pour chaque
fonction en temps réel
Quantification de la force musculaire en temps-réel
Basée sur la dynamique multi-corps et l’électromyographie
5. Discussion
La quantification des forces musculaires est cruciale dans plusieurs domaines
tels que la réadaptation, l’ergonomie, et le design d’exosquelettes efficaces.
Pour calculer les forces musculaires individuellement, il faut résoudre un
problème de redondance puisque plusieurs muscles activent une même
articulation.
Pour résoudre ce problème, une méthode non-invasive a été développée. Elle
utilise un processus d’optimisation basé sur la dynamique multi-corps et les
données électromyographiques (EMG) en temps-réel.
Ainsi, l’objectif de ce projet est de développer un outils de calcul des forces
musculaires du membre supérieur en utilisant un processus d’optimisation
basé sur la dynamique multi-corps et les données EMG.
Àce jour, les résultats sont satisfaisants pour un affichage fluide (<
40ms/trame (temps réel souple)). Nos travaux continuent pour atteindre un
objectif < 5ms/trame (temps réel strict).
La quantification de forces musculaires en temps
réel a plusieurs applications :
Évaluation fonctionnelle des
muscles pour des traitements
personnalisés [1] ou l’amélioration
de performance sportive [2]
Contrôle non-invasif d’exosquelette
ou de prothèse [3]
Exemple d’exosqueltte
http://eksobionics.com
La définition du temps réel peut différer selon
l’application :
Temps réel souple Temps réel strict
- < 200ms / trame
- Sans danger pour
la vie humaine
- < 5 ms/trame
- Danger pour la vie
humaine
< 40ms/ trame pour un affichage fluide
Développer une méthode de résolution
pour le problème de redondance afin
de déterminer les forces musculaires en
temps réel (< 5 ms) à l’aide de la
dynamique multi-corps et des données
EMG.
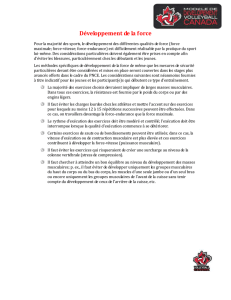
Étape 1 :
1. Calcul des facteurs d’ajustement (Ket Δ): Calibre les signaux
EMG normalisées avec la valeur de force mesurée sur le capteur.
2. Calcul du modèle du bras : Définit les paramètres
anthropologiques du bras à l’aide des positions des marqueurs
placés sur le bras recueillies par un système d’analyse du
mouvement.
Étape 2 :
1. Cinématique inverse : Estime la configuration des joints
(épaule et coude) qui correspond le mieux à la configuration
mesurée par les caméras.
2. Dynamique inverse : Calcule le couple au niveau coude (Qinv)
via les coordonnées relatives.
3. Calibration de la force musculaire : Calcule le couple au niveau
du coude (QEMG) avec les données EMG via le modèle de Hill.
4. Optimisation globale : Optimise la différence entre Qinv et
QEMG pour déterminer la force musculaire.
Tableau 4.2 : Comparaison des temps
d’exécution pour les fonctions critiques
Fonctions
critiques
Temps
(ratio)
Acquisition des
données 1,6 ms ( 4,2 %)
Cinématique
inverse 0,4 ms ( 1,1 %)
Dynamique
inverse < 0,1 ms ( 0,2 %)
Optimisation global
+ Hill Model
10,2 ms (27,8%)
Affichage
24,5 ms (66,6%)
Total
36,8 ms (100 %)
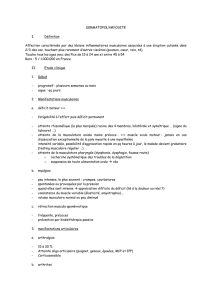
Graphique 4.1 : Comparaison des moments
calculés avec et sans optimisation
Différence maximale
entre les deux
courbes : 0,82 %
Quantification temps réel souple
(Tableau 4.1)
Temps d’exécution total de 37 ms
<40 ms pour un affichage fluide.
Temps d’affichage représente
67% du temps d’exécution et
pourrait facilement être réduit.
Quantification temps réel strict
(travaux en cours) (Tableau 4.2)
Temps d’exécution de
l’optimisation globale réduit de
10,2 à 0,4 ms.
Diminution significative du temps
d’exécution et les résultats sont
restés exacts (Graphique 4.1).
Travaux futurs
Modèle plus raffiné et étendu aux
autres membres.
Défis logiciel et hardware.
Schéma du processus de quantification de la force
musculaire en temps réel
[1] Raison M, Detrembleur C, Fisette P and Samin JC, “Assessment of Antagonistic Muscle
Forces During Forearm Flexion/Extension” Multibody Dynamics: Comput. Methods and
Applications 23:215–38, 2011.
[2] Wallmann H, Mercer J, Landers M, “Surface Electromyographic Assessment of the
Effect of Dynamic Activity and Dynamic Activity with Static Stretching of the
Gastrocnemius on Vertical Jump Performance “, Journal of Strength and Conditioning
Research 22(3) : 787-793, 2008
[3] Fleischer C, Hommel G, ‘’A Human-Exoskeleton Interface Utilizing Electromyograhy’’
IEEE TRANSACTIONS ON ROBOTICS, Vol. 24, No 4, August 2008
[4] De Jal´ on G, Bayo E (1993) Kinematic and dynamic simulation of multibody systems:
the realtime challenge. Springer, New York
1
/
1
100%