MECANIQUE : TD n°6 - Les CPGE de Loritz

L.PIETRI – Mécanique II : ch 4 - Lycée Henri Loritz – PCSI 2
MECANIQUE : TD n°6
A – APPLICATIONS DU COURS
1°) Des projectiles sont envoyés, avec une vitesse v=ve
x
constante, sur une cible mobile, qui subit une
translation uniforme de vitesse : v
0
=v
0
e
x
. Si T est la durée qui sépare l’émission de deux projectiles, déterminer la
durée T’ qui sépare leur réception sur la cible.
Rép : T’=Tv/(v-v
0
)
2°) Un nageur, dont la vitesse par rapport à l’eau est v
1
, veut traverser une rivière de largeur l. On suppose
que le courant a une vitesse v
0
uniforme. Déterminer le temps de traversée τ si :
a) il nage perpendiculairement aux berges, en se laissant déporter par le courant.
b) il suit une trajectoire perpendiculaire aux berges.
Rép : a) τ
1
=l/v
1
b) τ
2
=l/√(v
1
²-v
0
²)
3°) Une grande roue de fête foraine, de rayon R, tourne à vitesse angulaire constante ω autour d’un axe
horizontal (Ox). R
1
est le référentiel terrestre et R
2
le référentiel lié à la nacelle. Exprimer dans une base appropriée
la vitesse d’entraînement et l’accélération d’entraînement de R
2
/R
1
. (la nacelle effectue un mouvement de
translation circulaire par rapport à R
1
)
Rép : v
e
=Rωe
θ
θθ
θ
et a
e
=e
r
(-Rω²)
4°) Soit un plateau horizontal tournant avec une vitesse angulaire ω autour
d’un axe vertical fixe (manège par exemple). R
1
est le référentiel terrestre et R
2
le
référentiel lié au plateau. Un mobile de position M décrit à vitesse constante v l’axe
(Ox
2
), lié à R
2
. Exprimer v(M)
/R1
et a(M)
/R1
dans la base (e
r
,e
θ
θθ
θ
).
Rép : v
e
=Rωe
θ
θθ
θ
, v
a
=ωRe
θ
θθ
θ
+ve
r
et a
a
=e
θ
θθ
θ
(Rdω/dt+2ωv)+e
r
(-Rω²)
B – TRAVAUX DIRIGES
I - EFFET DÖPPLER
Un émetteur E , animé de la vitesse v uniforme par rapport à un observateur O, envoie des signaux se
propageant à la vitesse u dans le référentiel lié à O. (u étant colinéaire à v)
L'émetteur E envoie un signal à l’instant t
1
où la distance entre O et E est r
1
. Il envoie le signal suivant à
l'instant t
2
.
1°) Déterminer les instants t'
1
et t'
2
de réception des deux signaux consécutifs par l’observateur O.
2°) L'émetteur envoie des signaux avec une fréquence f. Quelle est la fréquence f’ perçue par
l'observateur? Comparer f et f’ dans le cas où l'émetteur s'éloigne de l'observateur et dans le cas où il s’en
rapproche.
3°) Le mouvement d'un vaisseau spatial qui s'approche de la Lune est purement radial (sa vitesse est
orthogonale à la surface lunaire). Ce vaisseau envoie vers la Lune un signal radio de fréquence 3,0 GHz ; il reçoit
de la Lune un écho décalé de 20 kHz. Quelle est la vitesse du vaisseau spatial par rapport à la Lune ? On prendra
c=3.10
8
m.s
-1
.
Rép : 1°) t’
1
=t
1
+r
1
/u et t’
2
=t
2
+(r
1
-v(t
2
-t
1
)/u. 2°) f’=f/(1-v/u) si l’émetteur s’approche f’>f sinon f≤f’ 3°) v=cδf/2f⇒v=1km/s
II - EQUILIBRE RELATIF D’UNE PARTICULE SUR UN CERCEAU EN ROTATION
Une particule, de masse m, glisse sans frottement sur un cerceau C de centre I, de rayon R, dont le plan
contient la verticale Oz; le cerceau C tourne autour de Oz à la vitesse angulaire ω constante. La distance du centre
I à la verticale Oz est IO=D.
On pose θ=(IP
0
,IP). A l’instant initial la particule P est abandonnée au point le plus haut du cercle.
1°) Calculer les forces d’inertie.
2°) A l’aide du PFD établir l’équation différentielle suivante:
&& sin ²cos (sin )
θ θ ω θ θ
= + −
g
R
D
R
3°) On se place dans le cas où D=2R. Montrer que pour une certaine valeur ω
0
de la
vitesse angulaire, on a une position d’équilibre relatif pour θ=45° . A.N pour R=0,5m.
Rép : 1°) Si on note (Oxyz) le référentiel mobile lié au solide alors f
e
=mω²ye
y
et f
c
=2mωdy/dt.e
x
2°) Par application du PFD dans le référentiel mobile on obtient après quelques lignes de calcul la relation
recherchée. 3°) ω
0
²=(g/R.tanθ)/(D/R-sinθ)⇒ω
0
≅4rad.s
-1
.

L.PIETRI – Mécanique II : ch 4 - Lycée Henri Loritz – PCSI 2
III - PARTICULE DANS UN ANNEAU EN ROTATION
Un cercle matériel (C) de centre C et de rayon R=0,25m est mis en rotation
uniforme par rapport au référentiel terrestre R supposé galiléen à la vitesse
angulaire constante positive Ω autour d’un diamètre vertical AO qui matérialise
l’axe vertical descendant Ox. Un petit anneau M assimilable à un point matériel M
coulisse sur (C) et est repéré par le paramètre angulaire θ=(Cx,CM) à l’instant t.
1°) On pose ω
0
²=g/R & λ=Ω²/ω
0
². A l’aide de la conservation de l’énergie
mécanique, écrire l’équation différentielle du mouvement sous la forme:
(d²θ/dt²)=ω
o
²f(θ) où f(θ)=sinθ(λcosθ-1)
2°) Retrouver les positions d’équilibres stables. Pour cela on pourra poser
u(θ)=E
p
(θ)/mgR et ainsi utiliser la propriété que u’(θ)=-f(θ).
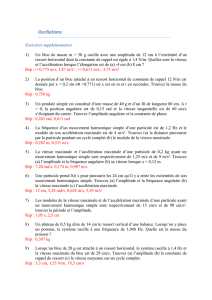
3°) Vérifier les résultats obtenus sur la représentation graphique ci-dessous:
Rép : 1°) On calcule E
k
=1/2mR²(dθ/dt)² et E
p
=-1/2mΩ²R²sin²θ+(1-cosθ)mgR (origine des potentiels prise
en O)
2°) Pour λ<1 c’est θ=0 et pour λ>1 c’est θ=±Arccos(1/λ)
3°) On vérifie bien le changement de stabilité pour θ=0
C – EXERCICES SUPPLEMENTAIRES
I- MOUVEMENT CYCLOÏDAL – POINT COÏNCIDENT
Une automobile se déplace d’un mouvement uniforme de vitesse v sur une route horizontale dirigée
suivant l’axe Ox du référentiel R : OXYZ, où OZ est la verticale ascendante. On admettra que les pneus roulent
sans glisser sur la route. On considérera le référentiel R’ Oxyz lié à une des roues de centre O, de rayon R, et
dont les axes sont parallèles à ceux de R.
0°) On a déjà vu x=R(ωt-sin(ωt)) & y=R(1-cos(ωt))
(Cf TD1 Ex : B-3)
1°) Déterminer la grandeur et la direction, par rapport à la route, de la vitesse de M, à l’instant t ,par
rapport à R et par rapport à R’. Faîtes la représentation vectorielle traduisant la loi de composition des vitesses
de M.
2°) Montrer que le support de la vitesse v de M, dans R, passe à chaque instant par le point I’,
diamétralement opposé au point de contact I du pneu avec le sol.
3°) Déterminer dans R l’accélération de M, le rayon de courbure R
c
, et la position du centre de courbure.
Rép : 1°) Par rapport à R : v=2Rωsin(ωt/2) et α=π-ωt/2 et par rapport à R’ : v=Rω et β=2α 2°) IM.v
a
=0 ⇒
⇒⇒
⇒ le support de v
passe par I’ 3°) R
c
=4Rsin(ωt/2) et MΩ
ΩΩ
Ω=2MI.
PUITS DE POTENTIEL
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
-3 ,4 -3 -2 ,6 -2 ,2 -1 ,8 -1 ,4 -1 -0 ,6 -0 ,2 0 ,2 0 ,6 1 1, 4 1 ,8 2 ,2 2 ,6 3 3, 4
[θ ] /
[θ ] /[θ ] /
[θ ] /
ra d
u( )
λ=5
λ=1
λ=0,25

L.PIETRI – Mécanique II : ch 4 - Lycée Henri Loritz – PCSI 2
II – COMPOSTION DE DEUX MOUVEMENTS CIRCULAIRES
Un point A se déplace sur un cercle C, de rayon r, de
centre 0 ; C est vertical et tourne autour d'un de ses diamètres
(0z) à la vitesse angulaire constante ω. Soit :
• θ= (Oz,OA ) ;
• α l'angle entre un plan vertical fixe (xOz) et le plan du cercle ;
• R le référentiel fixe (0xyz) ;
• R' le référentiel (0x’y’z’) lié au cercle.
Tous les vecteurs seront exprimés dans la base (e
x
’,
e
y
’, e
z
') liée au référentiel tournant R’, sauf indication contraire.
1°) Exprimer le vecteur position OA . En déduire par le calcul direct les vecteurs vitesse et accélération
de A dans R, exprimés dans la base de R’.
2°) Exprimer en fonction de θ les vecteurs vitesse et accélération de A par rapport à R’ dans la base de
Frénet (ou dans la base des coordonnées polaires sur le cercle), puis dans la base de R’.
3°) Déterminer la trajectoire du point coïncidant P dans le référentiel R. Exprimer alors la vitesse
d'entraînement et les accélérations d'entraînement et de Coriolis du point A.
4°) En déduire, en appliquant les lois de composition des vitesses et des accélérations, les vecteurs
vitesse et accélération de A par rapport à R, exprimés dans la base de R’. Montrer que l'on retrouve bien le
résultat de la question 1°).
Rép : 1°) OA=rsinθe
x
’+rcosθe
z
’ v
a
=rdθ/dt.cosθe
x
’+ωrsinθe
y
’-rdθ/dt.sinθe
z
’ et a
a
=e
x
’[d²θ/dt²cosθ-r(dθ/dt)²sinθ-
rω²sinθ]+e
y
’[2ωrdθ/dt.cosθ]-e
z
’[r(dθ/dt)²cosθ+rd²θ/dt²sinθ] 2°) rd²θ/dt²T+r(dθ/dt)².N 3°) Le point coïncident décrit un cercle
de rauon rsinθ à ω=cste d’où v
e
=ωrsinθe
y
’ et a
e
=-rsinθω²e
x
’, et a
c
=2rdθ/dtωcosθe
y
’ 4°) On retrouve bien les résultats de la
question 1°).
III – LE PROBLEME DU NAGEUR
Un nageur parti de A, se déplace à la vitesse constante V par rapport à l’eau
d’une rivière de largeur d dont les eaux sont animées de courant de vitesse constant u
(u<V). Le nageur effectue les trajets aller & retour: AA
1
A en un temps t
1
, et AA
2
A en un
temps t
2
.
1°) Exprimer le rapport t
2
/t
1
en fonction du rapport des vitesses β=u/V
2°) Sachant que t
2
=2t
1
=7mn, déterminer la direction de la vitesse V du nageur
qui se déplace à contre-courant pour atteindre A, et le temps t
0
qu’aurait mis le nageur
pour parcourir l’aller-retour (2d) sur un lac (u=0).
Rép : 1°) t
2
/t
1
=1/√(1-β²) 2°) t
0
=1min45s
IV – MOUVEMENT DE LA VALVE D’UNE ROUE
Une roue de rayon a et de centre C roule sans glisser sur l'axe (Ox), en restant
dans le plan (xOz). La valve est au point M (cf. schéma), à une distance b de l'axe de la
roue. Soit v la vitesse de C.
1°) Exprimer le vecteur vitesse de M par rapport à R, auquel est lié le repère (0,
e
x
, e
y
, e
z
), en utilisant la base orthonormée (i, j, e
y
) définie par CM=bi.
2°) Exprimer le vecteur accélération par rapport à R dans la même base.
Rép : 1°) v(M)=bv/a.j+ve
x
2°) a(M)=-b.(v/a)²i+b/a.dv/dt.j+dv/dt.e
x
.
V – MOUVEMENT ELLIPTIQUE D’UN POINT APPARTENANT A UNE TIGE
Une tige, de longueur l, a ses extrémités qui se déplacent, respectivement, le
long de l'axe Ox d'un référentiel R=Oxyz et le long d'une droite D parallèle à l'axe Oy. La
distance qui sépare D de Oy est OH = h. La position, dans le plan Oxy, d'un point
quelconque A de la tige BC est caractérisée par l'angle θ= (-Oy,BC). On note b la
distance AB.
1°) Exprimer, en fonction de θ, les coordonnées de C et A dans la base de R.
2°) Quelles sont, dans la base de R, les composantes de v
A/R
, de v
A/R1
, R
1
étant le référentiel, d'origine B,
en translation par rapport à R? Trouver la vitesse d'entraînement de R
1
par rapport à R.
3°) Quelles sont, dans la base de R, les composantes de a
A/R
et de a
A/R1
? Trouver l'accélération
d'entraînement de R
1
par rapport à R.
4°) Montrer que la trajectoire de A est une ellipse et déterminer ses caractéristiques.
Rép : 1°) OC=(h, -lcosθ) et OA=(h-(l-b)sinθ, -bcosθ) 2°) v
A/R
=[-(l-b).dθ/dt.cosθ, bdθ/dt.sinθ], v
A/R1
=[bdθ/dt.cosθ, bdθ/dtsinθ] et
v
e
=-ldθ/dtcosθe
x
3°) a
A/R
=[-(l-b).(d²θ/dt²cosθ-(dθ/dt)²sinθ), b(d²θ/dt²sinθ+(dθ/dt)²cosθ)], a
A/R1
=[b(d²θ/dt²cosθ-(dθ/dt)²sinθ),
b(d²θ/dt²sinθ+(dθ/dt)²cosθ)] et a
e
=-l(d²θ/dt²cosθ-(dθ/dt)²sinθ).e
x
. 4°) (y/b)²+((x-h)/(l-b))²=1
1
/
3
100%