polycopié de cours - Université de Lorraine

École Nationale Supérieure de Géologie
– Cours de première année –
Outils Mathématiques pour
l’Ingénieur
– Analyse Complexe –
Benoît Marx, Maître de Conférences à l’Université de Lorraine


Table des matières
1Fonctions d’une variable complexe 1
1.1 Rappels sur les nombres complexes . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Fonction d’une variable complexe . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Fonctionsmultivalentes............................. 4
1.4 Limite d’une fonction de la variable complexe . . . . . . . . . . . . . . . . 5
1.5 Dérivabilité d’une fonction de la variable complexe . . . . . . . . . . . . . . 6
2Intégration des fonctions de la variable complexe 9
2.1 Préliminaires .................................. 9
2.2 Inégalitéfondamentale ............................. 10
2.3 Intégration indépendante du chemin . . . . . . . . . . . . . . . . . . . . . . 13
2.4 IntégralesdeCauchy .............................. 14
2.4.1 Intégrale de fonctions sans singularité . . . . . . . . . . . . . . . . . 15
2.4.2 Intégrale de fonctions ayant des singularités . . . . . . . . . . . . . 16
2.5 Quelques exemples d’application . . . . . . . . . . . . . . . . . . . . . . . . 19
3Séries entières et résidus 21
3.1 SériesdeTaylor................................. 21
3.2 SériesdeLaurent ................................ 23
3.3 Théorèmedesrésidus.............................. 26
3.4 Quelques applications du calcul de résidus . . . . . . . . . . . . . . . . . . 28
3.4.1 Calcul d’intégrales de fractions rationnelles . . . . . . . . . . . . . . 28
3.4.2 Calcul d’intégrales de fonctions trigonométriques . . . . . . . . . . . 29
3.4.3 Calcul de sommes de séries . . . . . . . . . . . . . . . . . . . . . . . 30
3.4.4 Calcul d’intégrales réelles sur un axe . . . . . . . . . . . . . . . . . 32
3.4.5 Calcul d’intégrales de fonctions multivalentes . . . . . . . . . . . . . 32
4Sujets de travaux dirigés 35
TD1. Limite, Dérivation et Intégrales de Cauchy . . . . . . . . . . . . . . . . . . 37
TD2. Intégrales de Cauchy (suite) et Résidus . . . . . . . . . . . . . . . . . . . . 38
TD3. Résidus, Séries de Laurent et de Taylor . . . . . . . . . . . . . . . . . . . 39
iii


Chapitre 1
Fonctions d’une variable complexe
1.1 Rappels sur les nombres complexes
Toute l’algèbre des nombres complexes est fondée sur l’existence d’un nombre iayant
la propriété suivante
i2=−1
Tout nombre zdu corps des complexes Cse définit comme une combinaison linéaire du
couple (1, i)
∀z∈C, z =x+iy, x, y ∈R(1.1)
les réels xet ysont respectivement appelés parties réelle et imaginaire du nombre com-
plexe z, notées x=<(z)et y==(z). Cette représentation d’un nombre complexe est
dite cartésienne. On peut également représenter un nombre complexe en utilisant les
coordonnées polaires, dans ce cas on a :
z=reiθ =r(cos θ+isin θ), r ∈R+, θ ∈R(1.2)
Le module, noté r=|z|, est la distance entre zet l’origine. L’argument, noté θ=Arg(z),
est l’angle entre le vecteur porté par la droite des réels et le vecteur formé par z. Un
point du plan complexe peut avoir une infinité de coordonnées, car l’argument est défini
modulo 2π. On appelle représentation principale d’un point celle dont l’argument vérifie
0≤θ < 2π.
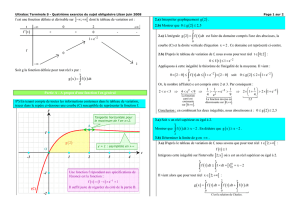
Re(z)
Im(z)
z
0
|z| arg(z)
ImIm
Re Re
0
z
Figure 1.1 – (à gauche) représentation cartésienne d’un complexe ; (à droite) représen-
tation polaire d’un complexe
On peut passer d’une représentation à l’autre par :
x=rcos θ r =px2+y2(1.3)
y=rsin θ θ = arctan y
x(1.4)
1
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
1
/
44
100%