Géométrie Projective I. La droite projective

Pr´eparation `a l’agr´egation externe de math´ematiques Ann´ee 2005-2006
Universit´e de Nice-Sophia-Antipolis
G´eom´etrie Projective
I. La droite projective
1. La droite projective ensembliste P1(K).
Soit Kun corps commutatif (non r´eduit `a deux ´el´ements, et le plus souvent ´egal `a Rou C).
1.1. D´efinition de P1(K).
D´efinition. L’ensemble P1(K) = K∪ {∞}, obtenu en ajoutant `a Kun ´el´ement ∞est appel´e la
droite projective ensembliste ou standard sur K.
Remarque. En tant qu’ensemble, P1(K) ne d´epend pas du choix de l’´el´ement ∞, puisque
K∪ {∞} et K∪ {∞0}sont en bijection.
1.2. Homographies. Groupe projectif GP1(K)de K.
Soient a, b, c, d ∈K,c6= 0, ad −bc 6= 0 et Hla K-homographie :
H:K\ {−d/c} → K\ {a/c}
x7→ ax +b
cx +d
L’application Hest une bijection. On peut prolonger en une application bijective P(H) : P1(K)→
P1(K) en posant P(H)(−d/c) = ∞et P(H)(∞) = a/c.
Si c= 0, Hest affine et on peut poser P(H)(∞) = ∞, ce qui d´efinit encore un prolongement
bijectif de Hsur P1(K), `a valeurs dans P1(K).
D´efinition. Pour toute K-homographie H, l’application bijective P(H) : P1(K)→P1(K)
d´efinie ci-dessus est appel´ee homographie de la droite projective P1(K).
Exercice 1. Montrer que P1(H)envoie ∞sur ∞ssi Hest affine.
Remarque. L’exercice 1 montre comment les homographies de la droite projective sont les
´equivalents des applications affines sur K: les homographies qui fixent ∞ont des restrictions `a
K(→P1(K)) qui sont affines.
Soit Gl2(K) le groupe des matrices inversibles 2 ×2 sur K. Pour M=a b
c d ∈Gl2(K), on
note P1(M) l’homographie P1(H), o`u Hest la K-homographie d´efinie ci-dessus. On v´erifie facilement
que :
•L’application Gl2(K)3M→P1(M) est surjective,
•Pour tout λ∈K∗,P1(λI2) = IdP1(K),P1(MN) = P1(M)◦P1(N) et P1(M)−1=P1(M−1).
On en d´eduit que les homographies de la droite projective P1(K) forment un groupe, appel´e le groupe
projectif de K.On le note GP1(K). L’application Gl2(K)3M7→ P1(M)∈GP1(K) est un morphisme
de groupes, de noyau K∗·I2, de sorte que GP1(K)'Gl2(K)/K∗·I2.
2. La droite projective ensembliste P1(D)d’une droite affine D.
Soit Dune droite affine sur K.
D´efinition. On note P1(D) l’ensemble D∪{∞D}. On l’appelle la droite projective ensembliste,
ou standard ou compl´et´ee de D.
D´efinition. Si Det D0sont deux droites affines sur K, on appelle homographie toute application
h:P1(D)→P1(D0) pour lesquelles existent des rep`eres affines sur φ:D→Ksur Det ψ:D0→K
sur D0tels ψ◦h|D◦φ−1:K→Ksoit une Khomographie.
1

Exercice 2. Montrer que la d´efinition ci-dessus ne d´epend pas du choix des rep`eres φet ψ(Ind.
Un changement de rep`eres affine est affine).
Montrer que l’ensemble des homographies de P1(K)sur P1(K)est un groupe, not´e GP1(D)
isomorphe `a GP1(K).
Exercice 3. Une homographie h:P1(D)→P1(D0)envoie ∞Dsur ∞D0ssi h|Dest affine (Ind.
ψ◦h|D◦φ−1:K→Kest une homographie qui est partout d´efinie, donc une application affine).
L’exercice 3 montre que les homographies g´en´eralisent aux droites projectives les applications
affines, en ce sens que les homographies qui “fixent” ∞(ie qui envoient ∞Dsur ∞D0), donnent par
restriction des applications affines.
3. Birapport.
D´efinition. Soient M, N, A, B quatre points d’une droite projective P1(D). On suppose D
munie d’une rep`ere affine et on note x, y, s, t les coordonn´ees de M, N, A, B dans ce rep`ere, lorsque
nos quatre points sont 6=∞D. On d´efinit le birapport [M, N, A, B]∈P1(K)de M, N, A, B par :
•[M, N, A, B] = M A
MB :N A
NB =x−s
x−t:y−s
y−t, si M, N, A, B sont distincts dans D.
•[∞D, N, A, B] = y−s
y−t, [M, ∞D, A, B] = x−s
x−t, [M, N, ∞D, B] = y−t
x−t, [M, N, A, ∞D] =
x−s
y−s, lorsque les d´enominateurs sont non nuls.
•[M, M, A, B] = [M, N, A, A] = 1, [A, N, A, B] = [M, N, A, N] = 0, [M, A, A, B] =
[B, N, A, B] = ∞.
Remarque. La d´efinition ci-dessus est ind´ependante du choix du rep`ere affine sur D.
On peut d´efinir le birapport [M, N, A, B] par MA
MB :N A
NB =x−s
x−t:y−s
y−t, en convenant que si
un des points est ∞D, son abscisse est le symbole ∞et que 1/0 = ∞, (∞ − a)/(∞ − b) = 1, pour
tout a, b ∈K.
Exercice 4. Montrer que [M, N, A, B] = [M, N, B, A]−1= [A, B, M, N].
Fixons maintenant N, A, B trois points distincts sur P1(D). L’application h:P1(D)→P1(K)
d´efinie par h(M) = [M, N, A, B] est une homographie, puisque l’abscisse de M(resp. de N, A, B)
dans un rep`ere de D´etant x(resp. y, s, t) (ou le symbole ∞si M=∞D(resp. si N, A, B =∞)),
h(M) est x−s
x−t:y−s
y−t.
On voit de plus que toute homographie s’obtient comme un birapport M7→ [M, N, A, B], pour
un choix convenable de N, A, B.
Exercice 5. Montrer que [M, N, A, B] = [M0, N, B, A] =⇒M=M0.
Th´eor`eme 1. — Soient Det D0deux droites affines.
(i)Soient N, A, B trois points distincts sur P1(D). L’application h:P1(D)→P1(K)d´efinie par
h(M) = [M, N, A, B]est l’unique homographie qui envoie (N, A, B)sur (1,0,∞).
(ii)Il existe une unique homographie qui envoie un triplet donn´e de P1(D)sur un triplet donn´e
de P1(D0).
(iii)Deux quadruplets de P1(D)et P1(D0)respectivement se correspondent par une homographie
ssi ils ont le mˆeme birapport.
Preuve. (i) Soient h0une autre homographie ayant cette propri´et´e. Alors h0◦h−1est une
homographie de P1(K) qui fixe ∞(il s’agit d’une application affine), et qui poss`ede deux points fixes
(1 et 0). Il s’ensuit que h0◦h−1est l’identit´e de P1(K).
(ii) Soit h:P1(D)→P1(K) l’homographie qui envoie le triplet (N, A, B) sur (1,0,∞),
h0:P1(D0)→P1(K) l’homographie qui envoie le triplet (N0, A0, B0) sur (1,0,∞). L’homographie
h0−1◦henvoie alors le le triplet (N, A, B) sur le triplet (N0, A0, B0). L’unicit´e r´esulte aussi de (i).
(iii) Par (ii), soit Hl’homographie qui envoie le triplet (N, A, B) sur le triplet (N0, A0, B0). Avec
les notations qui pr´ec`edent, on a H=h0−1◦ho`u h(M) = [M, N, A, B], h0(M0) = [M0, N0, A0, B0].
On a ainsi H(M) = M0ssi h(M) = h0(M0) ssi [M, N, A, B] = [M0, N 0, A0, B0]. 2
2

On a vu qu’une homographie h:P1(D)→P1(K) est un birapport et qu’une homographie
conserve les birapports. On peut de plus tester une homographie par le birapport de ses images :
Th´eor`eme 2. (caract´erisation des homographies via le birapport) — Une bijection f
de P1(D)sur P1(D0)est une homographie ssi elle conserve le birapport.
Preuve. Montrons qu’une homographie de P1(D) sur P1(D0) conserve le birapport. Ceci est
prouv´e dans le Th´eor`eme 1.(iii). Mais on peut aussi remarquer que l’abscisse de f(M) dans le rep`ere
image par fd’un rep`ere Rde Dest l’abscisse de Mdans R(Il suffit de prouver cela pour les bijections
de P1(K)).
Montrons maintenant que si fest une bijection de P1(D) sur P1(D0) qui conserve le birapport,
fest une homographie. Soient N, A, B trois points distincts de Det N0, A0, B0leurs images par f.
D’apr`es le Th´eor`eme 1.(ii), il existe une unique homographie hqui envoie (N, A, B) sur (N0, A0, B0).
Comme het fconservent le birapport, on a : [M, N, A, B] = [h(M), N, A, B] = [f(M), N, A, B], ce
qui impose f(M) = h(M). 2
4. Dictionnaire : Droites Affines, Applications Affines, Coordonn´ees / Droites
Projectives, Homographies, Birapports.
•Deux points O, A sur une droite affine Dd´efinissent une bijection affine de Dsur K, la
coordonn´ee de Mdans le rep`ere (O, A), par M7→ OM
OA .
•Trois points N, A, B sur P1(D) d´efinissent une homographie de P1(D) sur P1(K) par M7→
[M, N, A, B]. Lorsque B=∞D, on obtient la coordonn´ee de M∈Ddans (N, A), avec ∞Dde
coordonn´ee ∞. On peut donc dire que [M, N, A, B]∈P1(D) est la coordonn´ee de Mdans le
rep`ere projectif (N, A, B). De plus le changeur de coordonn´ees de deux rep`eres projectif (N, A, B) et
(N0, A0, B0) est une homographie de P1(D).
5. La droite projective comme l’ensemble des droites vectorielles P(K2)de K2.
Soit Dune droite affine et P1(D) la droite projective correspondante. Soit h:P1(D)→P1(K)
une homographie. On d´efinit φh:K2\{(0,0)} → P1(D) par : φh(x, y) = h−1(x/y), avec la convention
habituelle x/0 = ∞. L’application φhest constante sur les droites vectorielles (´epoint´ees) de K2et
d´efinit une bijection de l’ensemble des droites vectorielles P(K2) de K2sur P1(D).
D´efinition. On note l’ensemble des droites vectorielles de K2par P(K2), on l’appelle l’espace
projectif de l’espace vectoriel K2,P(K2) et P1(K) sont en bijection. On dit que (x, y)∈K2\ {(0,0)}
est un syst`eme de coordonn´ees homog`enes de h−1(x/y)∈P1(K).
5.1. Les homographies dans l’identification P(K2)'P1(D).
Soient P1(D) et P1(D0) deux droites projectives munies de rep`eres projectifs, on note t, t0∈P1(K)
respectivement les coordonn´ees dans ces rep`eres. Si Hest une homographie de P1(D) sur P1(D0) qui
associe au point de coordonn´ee tle point de coordonn´ee t0, on a : t0=at +b
ct +dpour a, b, c, d ∈Ktels
que ad −bc 6= 0.
Dans l’identification P(K2)'P1(D) que nous venons de mettre en ´evidence, nous avons t=x/y
et t0=x0/y0, ce qui donne :
(x0, y0) = (ax +by, cx +dy)
On a donc prouv´e :
Proposition 3. — Une homographie H:P1(D)→P1(D0)qui s’ecrit dans un choix de
rep`eres projectifs P1(K)3t7→ at +b
ct +d∈P1(K), correspond dans l’identification P(K2)'P1(D)`a
l’application de P(K2)dans P(K2)induite par l’isomorphisme lin´eaire (x, y)7→ (ax +by, cx +dy)en
les coordonn´ees homog`enes.
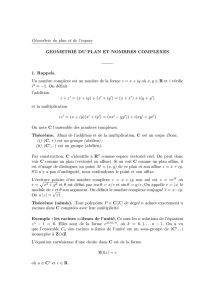
5.2. Interpr´etation g´eom´etrique des coordonn´ees homog`enes.
Dans K2, soit la ∆ droite affine d’´equation y= 1 et (x, y)∈K2\ {(0,0)}. La droite K·(x, y), de
pente x/y, qui correspond au point M(x/y) de P1(D) de coordonn´ee projective x/y coupe ∆ en un
point unique (x/y, 1), que l’on identifie `a K·(x, y) et au point M(x/y). Dans cette repr´esentation, la
3

droite de pente x/∞= 0, ie la droite Ox :{y= 0}correspont `a M(∞D). On a ainsi P1(D) = ∆∪{Ox}
et le point (x/y, 1) de ∆ est la droite de pente x/y.
∆
1
x/y Ox
M(x/y)
∆
x/y
5.3. Le birapport dans l’identification P(K2)'P1(D).
Soient M, N, A, B ∈P1(D) distincts et P1(D) ´etant munie d’un rep`ere projectif, soient
(m),(n),(a),(b) les droites de K2qui leur correspondent, x, y, s, t les coordonn´ees de M, N, A, B
dans notre rep`ere projectif. On a alors : [M, N, A, B] = x−s
x−t:y−s
y−t. Si M, N, A, B d´esigne
encore, par abus de notation, les points de la droite ∆ en lesquels (m),(n),(a),(b) coupe ∆, on a
M(x, 1), N(y, 1), A(s, 1), B(t, 1) (en supposant qu’aucun des points M, N, A, B est ∞) et donc :
[M, N, A, B] = x−s
x−t:y−s
y−t=det(
OM ,
OA)
det(
OM ,
OB):det(
ON ,
OA)
det(
ON ,
OB)
En particulier on voit, puisque le d´eterminant est bilin´eaire, que [M, N, A, B] ne d´epend pas des
points M, N, A, B choisis respectivement sur (m),(n),(a),(b). Il s’ensuit que [M, N, A, B] est attach´e
seulement aux droites (m),(n),(a),(b) (lorsque celles-ci sont distinctes et concourantes en un point
O) et peut se calculer en coupant (m),(n),(a),(b) respectivement en M0, N 0, A0, B0, par une droite
quelconque Lne contenant pas O, de la fa¸con suivante : on munit Ld’un rep`ere quelconque et on
calcule le birapport des points M0, N0, A0, B0(dans ce rep`ere).
Remarque. Le cas o`u t=∞se traite `a part et ne contredit pas ce qui pr´ec`ede. On obtient en
effet [M, N, A, B(∞)] = det(
OM ,
OA)
det(
OM , e):det(
ON ,
OA)
det(
ON , e)=M A
NA , o`u e est un vecteur directeur de Ox.
Par cons´equent pour calculer le birapport de quatre droites distinctes concourantes, ou de quatre
points de la droite projective, on peut se contenter de couper trois des quatres droites en M, N, A
par une droite parall`ele `a la quatri`eme, et calculer MA
NA .
∆
O
(m)
M
M’
(n)
N’
(a)
A
N
A’
(b)
B’
B
L
(m) (n) (a)
O
A
N
M
(b)
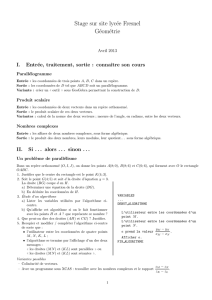
5.3. Sensibilit´e de l’oeil au birapport.
Soient 3 bornes M, N, A, B situ´ees sur une route rectiligne Det observ´ees depuis un point O.
L’observateur humain est capable de reconnaˆıtre que les bornes ont les mˆemes distances relatives sur
4

Dque celles des bornes observ´ees depuis un autre point O0(par exemples qu’elles sont ´equidistantes,
alors que les distances observ´ees ne semblent pas les mˆemes si l’observateur n’est pas sur la m´ediatrice
de [MA]). Autrement dit l’observateur estime que le birapport des droites (OM),(ON),(OA),∞D
est le mˆeme que celui des droites (O0M),(O0N),(O0A),∞D.
O
AN
M
O’
6. La droite projective comme compactifi´e d’Alexandrov de K=Rou C, topologie
de P1(K)et de P(K2).
Dans cette section K=Rou C, on les munit de la topologie induite par une norme. L’ensemble
P1(K) = K∪ {∞} est muni d’une topologie de la fa¸con suivante : une base d’ouverts de P1(K) est
constitu´ee des ouverts de Ket des compl´ementaires dans P1(K) des boules ferm´ees de K. L’espace
topologique ainsi obtenu est appel´e le compactifi´e d’Alexandrov de K.
Exercice 6. (i)- Montrer que P1(K)muni de cette topologie est un espace compact.
(ii)- Montrer qu’une application f:P1(K)→(E, d)`a valeurs dans un espace m´etrique (E, d)
est continue en ∞ssi ∀ > 0,∃A > 0tel que : kxk> A =⇒d(f(x), f(∞)) < .
(iii)- Montrer qu’une application f: (E, d)→P1(K)est continue en a,f(a) = ∞, ssi
∀B > 0,∃r > 0tel que : d(x, a)< r =⇒ kf(∞))k> B.
(iv)- En d´eduire que les homographies h:P1(K)→P1(K)sont des hom´eomorphismes.
L’exercice 6 justifie la notation du symbole ∞pour P1(H) comme dans la section 1.2, puisque
lim
x→−c/d H(x) = ∞.
Th´eor`eme 4. — P1(R)est hom´eomorphe `a S1,P1(C)est hom´eomorphe `a S2.
Preuve. •Soit S1le cercle unit´e de R2, muni de la topologie induite par la topologie standard
de R2et N= (0,1) ∈S1. On consid`ere l’application f:P1(R)→S1d´efinie de la fa¸con suivante :
la droite passant par Net coupant Ox 'Ren M, coupe S1en un unique point P. On pose
f(M) = Pet f(∞) = N. On dit que fest la projection st´er´eographique de centre P, il s’agit
d’une bijection. On a : f(x) = (2x/(x2+ 1),(x2−1)/(x2+ 1)), f(∞) = (0,1). Ce qui donne :
f−1(α, β) = ((1 + β)/(1 −β))1/2,f−1(N) = ∞. Ces expressions montrent (cf l’exercice 6) que fet
f−1sont continues.
•Pour P1(C) et S2, on proc`ede de la mˆeme fa¸con, avec la projection st´er´eographique de S2sur
C'Oxy ⊂R3de centre (0,0,1). 2
N
Ox M
P
N
M
P
Oxy
On a vu que P1(K) s’identifie avec l’ensemble des droites vectorielles P(K2) de K2. On va munir
P(K2) d’une topologie (la topologie quotient) et montrer que P1(K) est hom´eomorphe `a P(K2).
5
 6
6
1
/
6
100%