Mécanique et automatique

!"
"
!"#$#$% % &'()*%+(,-.)*%/012,3*0,*%4*%!.'5.6%
#!"$%&'(&")("*+,-.)&'/"0.1-2'"
34567"898:9;"
<<<<<<<<<<"
"
82'=2(+-")>$)?.--.2'"&'""7-*%.662*%
89+:&%;9!<+:=>&%&?%;9!<+:=>&%
/*@@3(6%ABB#%
<<<<<<<<<<"
"
91,*0C*%4*%;9!<+:=>&%&?%<>?D;<?:=>&%
"
<<<<<<<<<<"
"
@(+,&"A"E%5*0,*@"
"
<<<<<<<<<<"
"
!"#"$%&'#"()$*%$+),*%-"*'./,0%
%
1+",-2)%&)%#-3#"3-*./#),%&)%4'#5)%6%-3/()$*-*/'$%-"*'$'()7%$'$%/(4./(-$*)%)*%,-$,%
&'#"()$*%&+-##'(4-2$)()$*7%),*%-"*'./,07%"$)%,)"3)%6%3-%8'/,%0*-$*%-&(/,)%,".%3-%*-93)%'"%3)%
4',*)%&)%*.-:-/3%;#/.#"3-/.)%$<==%>?@%&"%?).%80:./).%?===AB%
"
+(F.G%B"*$+/.+")>('"-(**2+/"=2??('C"1>,*+&(%&"=2?*2+/&")&(D"*$+/.&-"/2/$1&?&'/"
.'),*&')$'/&-"A"
E,=$'.F(&"G,',+$1&"H"
9(/2?$/.F(&"I-J-/K?&-"$--&+%.-"1.',$.+&-LM"
N&" -(O&/" =2?*2+/&" !7" *$G&-C" P" $''&D&-" )2'/" A% 4('0-*6F@H,21(6@*@% I% ,*64,*% .C*'% C(F,*%
'(13*G%
J*%'.6434.F%4*C,.%F,.3F*,%)*@%4*0K%1.,F3*@G%!*@%4*0K%1.,F3*@%1*0C*6F%LF,*%F,.3F2*@%
4.6@%06%(,4,*%M0*)'(6M0*G%
:)%*@F%'(6@*3))2%.0%'.6434.F%4*%)3,*%.FF*6F3C*-*6F%)*%@0N*F%*6%*6F3*,%*F%)>$==2+)&+"('"/&?*-"
-&'-.Q1&?&'/",G$1"*2(+"=R$=('&")&-")&(D"*$+/.&-M"
J*@%4*0K%1.,F3*@%F,.3F2*@%@*,(6F%,243O2*@%@0,%4*@%'(13*@%@21.,2*@"&/".1"S$()+$"*+,=.-&+"-(+"
=R$F(&"=2*.&"A"
1&"/./+&"H"
1&"+&*K+&")&"1>,*+&(%&"H"
1$"*$+/.&")&"1>,*+&(%&"/+$./,&"H"
1&"'2?Q+&")&"S&(.11&-"=2'-/./($'/"1$"=2*.&M%
"
T2(-"%&.11&+&U"V"+&')+&"1&-")2=(?&'/-"+,*2'-&-"$%&="1&-"=2*.&-"=2++&-*2')$'/&-M"

5"
"
:+?PDQ>!?:D+%
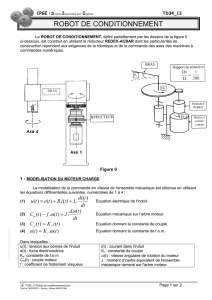
;2(-" *+2*2-2'-" )>,/().&+" *$+/.&11&?&'/" 1&" S2'=/.2''&?&'/" )>('" +2Q2/" V" #" $D&-" )&" /J*&"
W"XYX9" XZ67"[M" 8&" +2Q2/" &-/" ?.-" &'"-./($/.2'"-(+"1$"\.G(+&"!M"]1" &-/" .=." (/.1.-," )$'-" ('&"
$**1.=$/.2'")&"?&-(+&"-$'-"=2'/$=/M"
"
@$'-" =&//&" $**1.=$/.2'C" 1$" /^/&" )&" ?&-(+&" &-/" ,F(.*,&" )>('" -J-/K?&" )&" 12=$1.-$/.2'" I/+.K)+&"
?$/,+.$1.-,"*$+"1&-"/+2.-"$D&-"&'"'2.+"-(+"1$"*R2/2G+$*R.&"&/")2'/"1$"*2-./.2'"$Q-21(&"&-/"+&*,+,&"
*$+" ('" -J-/K?&" )>$=F(.-./.2'LM" 8&=." *&+?&/")>&SS&=/(&+"1&-"?&-(+&-"-(+"1$"*.K=&"
.'),*&')$??&'/")&"1$"*+,=.-.2'")("+2Q2/M"
"
_2(+" )>$(/+&-" $**1.=$/.2'-C" )&" -2()$G&" *$+" &D&?*1&C" 1$" *+,=.-.2'" )(" +2Q2/" +&%^/" $12+-" ('&"
G+$')&".?*2+/$'=&M"
R3O0,*%$%S%;3@*%*6%@3F0.F3(6%40%,(T(F%
"
8R$F(&" -21.)&" C/C/=7C!C5C6C 4CPC#
{}
" $)?&/" *2(+" +&*K+&" 2+/R2'2+?,").+&=/"1.,"1&"+&*K+&"
D/IE/C&
F
%
/C&
G%
/C&
H
%
/LM" N&" +&*K+&"
D7IE7C
&
F
%
7C
&
G%
7C
&
H
%
7L" &-/" 1.," $(" Q`/." I&?Q$-&L" &/" =2'-/./(&" 1&" +&*K+&"
$Q-21(M"
"
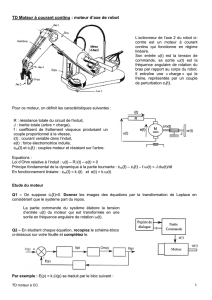
N&-"+2/$/.2'-"*2--.Q1&-C"*2(+"=R$=('")&-"$D&-")("+2Q2/C"-2'/"*+2*2-,&-"-(+"1$"\.G(+&"5M"
"
N>&?Q$-&" I-21.)&"
C
7L" &-/" S.D,&" $(" -21C" 1>,*$(1&" I-21.)&"
C
!L" &-/" &'" 1.$.-2'" *.%2/C" )>$D&"
I77C&
H
%
7L=I7!C&
H
%
!L"&/")&"*$+$?K/+&"$'G(1$.+&"
α
!C"*$+"+$**2+/"V"1>&?Q$-&M"
"
N&" Q+$-" I-21.)&"
C
5L" &-/" &'" 1.$.-2'" *.%2/C" )>$D&"
IE5C
&
H
%
5L" &/" )&" *$+$?K/+&" $'G(1$.+&"
α
5C" *$+"
+$**2+/"V"1>,*$(1&M"
"
N>$%$'/aQ+$-" I-21.)&"
C
6L" &-/" &'" 1.$.-2'" *.%2/C" )>$D&"
IE6C
&
H
%
6L" I$%&="
&
H
%
6=&
H
%
5L" &/" )&" *$+$?K/+&"
$'G(1$.+&"
α
6C"*$+"+$**2+/"$("Q+$-M"
"

6"
"
"
N&"*2.G'&/"&-/"=2'-/./(,")&"/+2.-"1.$.-2'-")&"/J*&"*.%2/"A"
• N$"*+&?.K+&"&-/"('&"+2/$/.2'")("-21.)&"
C
4"$(/2(+")&"1>$D&"
IE4C&
H
%
4L"I
&
H
%
4"&-/"2+/R2G2'$1"V"
&
H
%
6L"&/")&"*$+$?K/+&"$'G(1$.+&"
α
4M"
• N$"-&=2')&"&-/"('&"+2/$/.2'")("-21.)&"
C
P"$(/2(+")&"1>$D&"
IEPC&
H
%
PL"I
&
H
%
P"&-/"2+/R2G2'$1"V"
&
H
%
4L"&/")&"*$+$?K/+&"$'G(1$.+&"
α
PM"
• N$" /+2.-.K?&" &-/" ('&" +2/$/.2'" )(" -21.)&"
C
#"IQ+2=R&"*2+/&"=$*/&(+"'2'"+&*+,-&'/,&L"
$(/2(+")&"1>$D&"
IE#C&
H
%
#L"I
&
H
%
#"&-/"2+/R2G2'$1"V"
&
H
%
PL"&/")&"*$+$?K/+&"$'G(1$.+&"
α
#M"
"
b'"'2/&+$"
I
/"1&-"=2(*1&-"S2(+'.-"*$+"1&-"$=/.2''&(+-"$--2=.,-M"
"
R3O0,*%A%S%U0*%40%,(T(F%VI%O.0'5*W%*F%42X363F3(6%4*@%,(F.F3(6@%VI%4,(3F*W%
"
_2(+"1$"=2??2)./,")("*$+$?,/+$G&C"1&"*2.'/" E7"&-/"=R2.-."-(+"1>$D&"
!
!"&/"-(+"1&"-21M"@$'-"1&"
+&*K+&"$Q-21("
D
7IE7C&
F
%
7C&
G%
7C&
H
%
7L"&/")$'-"1$"=2'S.G(+$/.2'"),S.'.&"-(+"1$"\.G(+&"5"IV"G$(=R&LC"1&-"
*2-./.2'-")&-"*2.'/-" E/"-2'/")2'',-"*$+"
E7E/
→=//
&
F%
7+J/
&
G%
7+K/
&
H%
7"F(&"'2(-"'2/&+2'-",G$1&?&'/"
E7E/
→=//HJ/HK/
()
M"
"
@$'-"=&//&"&D*+&--.2'C"1&-" //HJ/HK/
()
"-2'/"&D*+.?,-"&'"?K/+&"A"
"
E7E!
→=7H7H7Cc!P
()
"E7E5
→=7C6P7H7H7Cc!P
()
"E7E6
→=7C 6P7H7H!C##P
()
"
E7E4
→=7Cc!7H7H!Cc!7
()
"E7EP
→=!C!d7H7H!Cc!7
()
"E7E#
→=!C64H7H!Cc!7
()
"
"
N&"=$').)$/"&-/".'%./,C"/2(/"$("12'G")&"1>,*+&(%&C"V"*2-&+"/2(/&"RJ*2/RK-&"F(>.1"O(G&+$"(/.1&"I&'"
1$"O(-/.S.$'/LM"
&
F
%
7
&
H
%
7

4"
"
YP&;:ZP&%Y<P?:&%
;9!<+:=>&%
$ 9F04*%O2(-2F,3M0*%*F%'362-.F3M0*%
?B? L'$$).%3)%2.-45)%&),%3/-/,'$,%4'".%#)%.'9'*B%
?BM N")3%),*%3)%$'(9.)%&)%('9/3/*0,%&)%#)**)%#5-O$)%-.*/#"30)%P%
?BQ RF/,*)S*S/3%&),%('9/3/*0,%/$*).$),%P%T",*/8/).B%
?BU V.'4',).%"$%,#50(-%#/$0(-*/W")%(/$/(-3%4'".%#)%.'9'*B%
"
;2(-"'2(-"*1$e2'-")$'-"1&"=$-"2f"-&(1-"1&-"$D&-"
!
5C"
!
6"&/"
!
P"-2'/"$=/.%,-M"@$'-"=&"=$-C"1&"
?2(%&?&'/" &-/" *1$'" &/" 1&" -=R,?$" =.',?$/.F(&" $.'-." F(&" 1&" *$+$?,/+$G&" &-/" *+,-&'/," -(+" 1$"
\.G(+&"6M"
"
82??&"=&+/$.'-")&G+,-")&"1.Q&+/,-"-2'/"Q12F(,-C"'2(-"-2??&-"$?&',-"V"=2'-.),+&+"1&"-21.)&"
C
5C"1>&'-&?Q1&"
R
6=
C
6+
C
4"&/"1>&'-&?Q1&"
R
P=
C
P+
C
#M"
"
;2(-"),S.'.--2'-"1&"*2.'/"
1
"1.,"$("-21.)&"
C
#M"g$"*2-./.2'"&-/")2'',&"*$+"
EP1
→=3&
F%
PM"
R3O0,*%"%S%@'52-.%'362-.F3M0*%*F%,*12,.O*%1(0,%).%M0*@F3(6%$G[%
%
?BX L0*).(/$).% 3-% :/*),,)% &"% 4'/$*% 1% &-$,% 3)% .)4Y.)% D7% )$% 8'$#*/'$% &)%
α
5=-$2
&
F%
7
&
F%
5
()
7%
α
6=-$2 &
F%
5
&
F%
6
()
%)*%
α
P=-$2
&
F%
6
&
F%
P
()
B%
"
&
F
%
5
&
H%
5E5
E6
&
F
%
7
&
H%
7
C
5
&
F%
6
&
H%
6
R
6
&
F
%
P
&
H%
P
R
P
EP
!3
"
<66*K*%[%
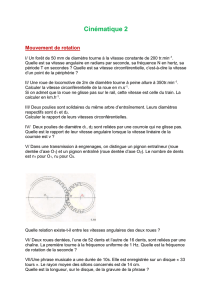
h+$=,")&"1$"S2'=/.2'")&"/+$'-S&+/"&'"Q2(=1&"2(%&+/&")$'-"1&"*1$'")&"i2)&"
h+$=,")&"1$"S2'=/.2'")&"/+$'-S&+/"&'"Q2(=1&"2(%&+/&")$'-"1&"*1$'")&"i1$=ja;.=R21-"
"
"
"
"
"
"
Pulsation (rad/s)
-150
-100
-50
0
50
100
Amplitude (dB)
10
-1
10
0
10
1
10
2
10
3
10
4
-270
-225
-180
-135
-90
Phase (deg)
Amplitude 4 boucle ouverte (dB)
Phase 4 boucle ouverte (deg)"
-360 -315 -270 -225 -180 -135 -90 -45 0
-150
-100
-50
0
50
-160 dB
0 dB
6 dB
3 dB
1 dB
0.5 dB
0.25 dB
-40 dB
-1 dB
-3 dB
-6 dB
-12 dB
-20 dB
-140 dB
-60 dB
-80 dB
-100 dB
-120 dB

!2
"
<66*K*%"%
@,*$--&?&'/"&'"+,G.?&".').=.&1"&'"S2'=/.2'")&"1>$?2+/.--&?&'/"A"
5
!
M
M!77k
ξ
ξπ
−
−
=)L "
"
00.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
10
20
30
40
50
60
70
80
90
100
Coefficient d'amortissement
Dépassement en %
"
"
P"
"
A 9F04*%4\6.-3M0*%*F%'5(3K%4*%-(F*0,%
@$'-" /2(/&" =&//&" *$+/.&" )J'$?.F(&C" -&(1-" 1&-" $D&-"
!
5"&/"
!
6" -2'/" $=/.%,-" *$+" )&-" ?2/&(+-"
S2(+'.--$'/")&-"=2(*1&-"
I
5"&/"
I
6M"N&"*2.'/"E5"&-/")2'="S.D&M"
"
b'"'2/&"
R
6C"1>&'-&?Q1&"=2'-/./(,")&"1$"+,('.2'")&-"-21.)&-"
C
6C"
C
4C"
C
P"&/"
C
#M"
"
b'" *+2*2-&C" -(+" 1$" \.G(+&" 4C" 1&" -=R,?$" =.',?$/.F(&" *1$'" +&/&'(" *2(+" /2(/&" =&//&" *$+/.&"
)J'$?.F(&"5"$.'-."F(&"1&"+&*,+$G&"$--2=.,M"
R3O0,*%E%S%@'52-.%'362-.F3M0*%*F%,*12,.O*%1(0,%).%1.,F3*%4\6.-3M0*%A%
b'"'2/&"
Z
5"1&"=&'/+&")&"G+$%./,")("-21.)&"
C
5M"@$'-"1&"+&*K+&"
D5IE5C
&
F
%
5C&
G%
5C&
H
%
5LC"2'"$"1$"+&1$/.2'""
E5Z5
→=-5C95C#5
()
=7C45H7H7
()
M"l'"=&"*2.'/"
Z
5C"1$"?$/+.=&")>.'&+/.&")("-21.)&"
C
5"->,=+./"A"
[C
5
()
Z5
=
!577
7\57
77]5
§
©
¨
¨
¨
·
¹
¸
¸
¸
Z5C&
F%
5C&
G%
5C&
H%
5
()
"
b'")2''&" !5=7CPjG?5C" \5=]5=PC6jG?5M"N$"?$--&" (5")("-21.)&"
C
5"&-/" (5=PPjGM"
b'"'2/&"
Z
6"1&"=&'/+&")&"G+$%./,")&"1>&'-&?Q1&"
R
6M"@$'-"1&"+&*K+&"
D
6IE6C&
F
%
6C&
G%
6C&
H
%
6LC"2'"$"1$"
+&1$/.2'""E6Z6
→=-6C96C#6
()
=7C!cH7H7C!7
()
M"l'"=&"*2.'/"
Z
6C"1$"?$/+.=&")>.'&+/.&")&"1>&'-&?Q1&"
R
6"->,=+./"A"
[R
6
()
Z6
=
!677
7\67
77]6
§
©
¨
¨
¨
·
¹
¸
¸
¸
Z6C&
F%
6C&
G%
6C&
H%
6
()
"
b'")2''&" !6=7CPdjG?5C" \6=#Cc7jG?5"&/"]6=dC74 jG?5M"N$"?$--&" (6")&"1>&'-&?Q1&"
R
6"
&-/" (6=P7jGM"
&
F
%
5
&
H%
5E5
E6
&
F
%
7
&
H%
7
C
5
&
F%
6
&
H%
6
R
6
 6
7
8
6
7
8
1
/
8
100%