DYNAMIQUE DES MOUVEMENTS DE TRANSLATION

STI
TD 01 DYNAMIQUE – Exercices d’application
M5
Nom :
Prénom :
Date :
1
E
E
Ex
x
xe
e
er
r
rc
c
ci
i
ic
c
ce
e
e
1
1
1
:
:
:
d
d
dé
é
ém
m
ma
a
ar
r
rr
r
ra
a
ag
g
ge
e
e
e
e
en
n
n
c
c
co
o
ot
t
te
e
e
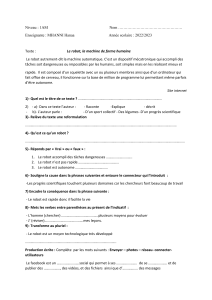
Objectif : Évaluer le couple moteur d’un véhicule traction avant de 1200 kg montant une côte.
1.1- Déterminer les composantes du poids dans le repère (A,X,Y)
1.2- Déterminer la force de poussée de la route sur la roue avant
si :
- le véhicule démarre avec une accélération de 1m/s2.
- le véhicule roule à vitesse constante
1.3- En déduire, pour chaque cas, le couple à fournir aux roues
avant si leur rayon est de 35cm.
E
E
Ex
x
xe
e
er
r
rc
c
ci
i
ic
c
ce
e
e
2
2
2
:
:
:
s
s
so
o
ol
l
li
i
id
d
de
e
e
e
e
en
n
n
l
l
li
i
ia
a
ai
i
is
s
so
o
on
n
n
g
g
gl
l
li
i
is
s
ss
s
si
i
iè
è
èr
r
re
e
e
On considère un solide S de 3kg en liaison glissière d’axe Ox avec le solide
fixe 1. Le solide S atteint la vitesse de 1 m/s en 0,5s.
Objectif : Déterminer l’effort nécessaire pour obtenir cette vitesse
spécifiée.
Soient l’isolement et le bilan des actions mécaniques extérieures agissant sur S :
2.1- Appliquer le Principe fondamental de la dynamique au solide S et déterminer les composantes inconnues
des actions mécaniques extérieures agissant sur S.
E
E
Ex
x
xe
e
er
r
rc
c
ci
i
ic
c
ce
e
e
3
3
3
:
:
:
R
R
Ro
o
ob
b
bo
o
ot
t
t
N
N
No
o
ok
k
ki
i
ia
a
a
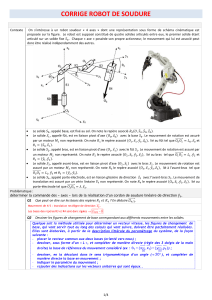
Le système isolé est un robot. On suppose qu’il est équivalent à un système en translation rectiligne uniformément
accélérée d’axe (O,x).
Données :
- Masse du robot : m = 2000 kg
- Action mécanique de la terre sur le robot (R) en G :
P
(0,0,PZ)
- Action mécanique du rail (0) sur le galet (19’) en A :
19/O
A
(0,0,AZ)
- Action mécanique du rail (0) sur le galet (19) en B :
19/O
B
(BX,0,BZ)
3.1. Préciser les composantes de
P
; effectuer l’application
numérique.
3.2. On applique le principe fondamental de la dynamique, en G, au robot dans le repère galiléen (O,x,y,z). On
prendra atR/R0 = 0,15 m /s2.
Exprimer l’équation de la résultante dynamique en projection sur (O,x) à l’aide de la modélisation. En déduire
la valeur de Bx.
P
F2/S
m.a
F1/S
G
Galet (19)
A0/19
A
B
Robot (R)
x
z
O
B0/19
Sens de
l’accélération
P
G
1
/
1
100%