4emecourselectroniquepuissanceRSAMPH_inst_petrol

Cours d’Electronique de puissance
Chapitre II : Les montages Redresseurs
Chaibainou khaled
Khaled,chaibainou@gmail,com
1
« Les convertisseurs AC/DC »

Introduction
Quatre types de conversion de l'énergie électrique
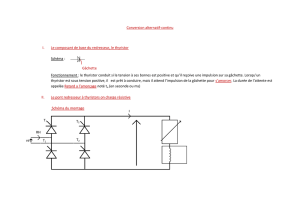
1- Conversion alternatif / continu (AC / DC):
•Montage redresseur
- non commandé (à diodes)
-commandé (à thyristors)
•Applications
-
-
-
alimentation continue (pour circuits électroniques)
alimentation pour moteur à courant continu
chargeur de batteries ... 2

2- Conversion continu / continu (DC / DC)
•Montage hacheur
-série (abaisseur de tension)
- parallèle (élévateur de tension)
•Applications
- alimentation à découpage (ordinateur, mobile
- alimentation pour moteur à courant continu …)
3

3- Conversion continu / alternatif (DC / AC)
•Montage onduleur
•Applications
- alimentation de secours (+ groupe électrogène)
- variateur de vitesse pour moteur asynchrone ...
4

4- Conversion alternatif / alternatif (AC / AC)
•Montage gradateur
•Applications
-
-variateur
variateur de
de lampe halogène
vitesse pour moteur universel ...
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%





![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)