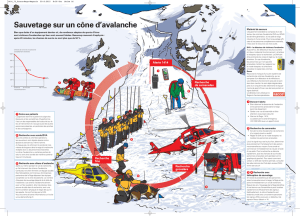
Prévision de la trajectoire d`une avalanche

Prévision de la trajectoire d'une
avalanche dense
●Construction d’une simulation numérique de l’écoulement d’une
avalanche dense
●Modélisation
●Mise en équation et résolution
●Traitement par un ordinateur
–Tracés
–Comment marche le programme ?
●Testons le réalisme de la simulation (C’est ici que votre aide est
vraiment nécessaire )
●Ecart avec le réel (diapo 11)
●Et les recherches actuelles ?
J’indiquerais en vert mes principales questions, ceci n’apparaitra pas dans la présentation finale.

Modélisation
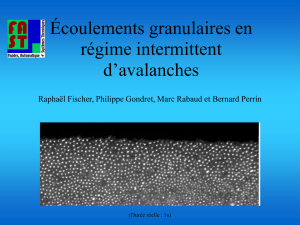
1) Modélisation d’une avalanche par des grains
●Visuellement: l’avalanche que ce soit l’observation de l’écoulement ou des dépôts présente une
structure granulaire.
●Expérimentalement:
–L’avalanche de neige dense présente les même hauteurs de dépôts que l’avalanche de
grains. Ici le profil du relief est dessiné en noir, la hauteur de dépôt est notée h.
–Les angles pour lesquels on peut observer un écoulement permanent et uniforme insensible
aux perturbation sont les mêmes pour l’avalanche de neige dense et celle de grain. Ces
angles sont notés Al1 pour l’angle à partir duquel il n’y a plus accumulation des grains et Al2
l’angle à partir duquel le système est sensible aux perturbations.

Modélisation
2) Utilisation de grains bidisperses
On utilise expérimentalement des grains bidisperses (c’est-à-dire de deux tailles différentes) afin de
tenir compte des différentes répartitions des vitesses en fonction de la hauteur. En effet, les petits
grains vont finir par se placer sous les plus gros créant une répartition des vitesses similaire à celle
mesurée dans les avalanches réelles.
La simulation de ce TIPE ne prendra pas en compte cet aspect du phénomène et on modélisera
l’avalanche par un ensemble de grains identiques. Quel en est l’impact ?

Modélisation
3) Bilan des forces
Un grain est modélisé par une masse ponctuelle.
Il subit les forces suivantes:
●Le poids
avec et
●Les frottements
–Force de frottement solide coulombien:
–Force de frottement traduisant la dissipation turbulente (Modèle de Voellmy):
Dt=
Avec Ɛ un coefficient variant entre 400 et 2000 selon les caractéristiques du milieu (présence d’arbre,
rugosité des couloirs…) et h la hauteur caractéristique de l’écoulement (c’est à dire la hauteur
maximale atteinte). Que représente physiquement la dissipation turbulente ?
Avec µ un coefficient variant entre 0,1 et
0,8 selon les caractéristiques de
l’avalanche (masse volumique, la
viscosité..), V la vitesse et la réaction
normale.

Mise en équation du problème et résolution
1) Résolution exacte dans un cas simple (angle A constant)
Principe fondamental de la dynamique
En projetant sur l’axe perpendiculaire à
et en faisant l’hypothèse supplémentaire que
l’avalanche ne subit aucun mouvement selon cet axe:
g.cos A.(tan A − µ)(1−e
.
avec
Si la vitesse est définie, sinon elle peut s’annuler pour
Si , on atteint une vitesse limite
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%