support au formet powerpoint.

DEA Perception et Traitement de
l’Information
Reconnaissance des formes
Règle de Bayes
S. Canu
http://psichaud.insa-rouen.fr/~scanu/RdF

Buts de la RdF
D: Algorithme
de
Reconnaissance
des Formes
Une forme x
(vecteur forme
des caractéristiques)
C’est
la forme
«y=D(x) »
classe" vraiela" ,
)( ,...,,...,1 : RdF
décisions des ensemble ,...,2,1 tiquescaractéris des espace
D(x)Rx
xDx LlRD
Ly Rx
d
d
d
Nous voulons un algorithme de RdF performant
K
kkXk
D
sSPdxkxfxDsCXDSCEDJ
DJD
1 ,)(,)(,)(
)(min décision de règle uned'Cout D

K
kkXk
D
sSPdxkxfxDsCXDSCEDJ
DJD
1 ,)(,)(,)(
)(min décision de règle uned'Cout D
Théorème de Bayes (et non la règle)
)(
),(
: ème théor
),(,
)(,
, jointe loi
),()( ns"observatio" des loi
à (analogue ),( ncevraisembla
posteriori à loi
priori à loi
xf sSPkxf
xsSP
sSPkxfxsSP
xfxsSPxsSP
xsSP
sSPkxfxf
sSxPkxf
xsSP
sSP
X
kX
k
kXk
Xkk
k
k
kXX
kX
k
k
Ex : en français P(e) = 0,12
On choisi la source, et on émet
On choisi une observation, et on décide
Ex : après avoir observé x
quelle est P(e|x) ?
Attention à la confusion
source - action

10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
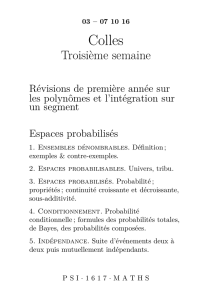
illustration
source 1
source 2
sans autre information
on décide toujours
qu’un pixel
vient de la zone
(source 1)
car P(S1) > P(S2)
A PRIORI
que se passe t’il
si l’on connaît
un caratéristique : x
l’intensité

-50 0 50 100
0
500
1000
1500
2000
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
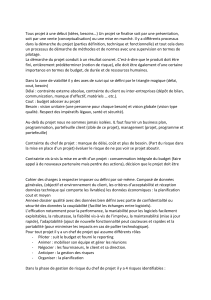
illustration
source 1
source 2
Caractéristique : x
l’intensité
on décide
l’action qui « coûte »
le moins cher
en cout 0-1
c’est la classe max
A POSTERIORI
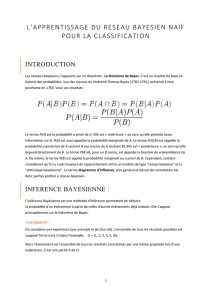
x
f(x|s1)
f(x|s2)
Les vraisemblances
111 ,SPSxfxaP
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%