Simulation d`un processus de Poisson - PUC-SP

Simulation d’un processus de Poisson
Étude de la radioactiviténaturelle

Simulation d’un processus de Poisson
1–Observation d’une masse de matière radioactive, hypothèses de travail
Simulation numérique du phénomène de la radioactiviténaturelle : passer d’une
simple observation àla connaissance de la période d’un élément radioactif en
vue d’applications comme la datation.
D’autres objectifs peuvent être visés :
1) Compréhension d’un processus de modélisation et place de la simulation
informatique,
2) Etude de la loi exponentielle et application aux phénomènes d’attente,
3) Rapports entre loi exponentielle et loi de Poisson, approximation binomiale de
la loi de Poisson, approximation de la loi exponentielle par une loi géométrique,
4) Ajustement d’une loi, contrôle par un test du 2.

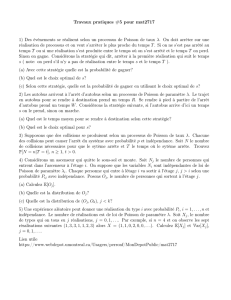
Simulation d’un processus de Poisson
Un capteur enregistre les instants successifs oùl’un des atomes de la masse se
désintègre (événement A). Àpartir de cette observation, on désire connaître la période
de l’élément radioactif considéré.
Première étape du processus de modélisation : formuler des «hypothèses de
travail »en vue d’obtenir un modèle pseudo concret du phénomène.
Deuxième étape : transformer ces hypothèses de travail en «hypothèses de
modèle »constituant le modèle probabiliste dont les conséquences théoriques
permettront d’interpréter les données statistiques et de résoudre le problème
posé.
Hypothèses de travail:
L’événement Apeut survenir inopinément et se répéter fortuitement.
-Il n’y a pas de moments oùAapparaît plus souvent que d’autres : le phénomène
est homogène dans le temps.
-Les «chances »de voir Ase produire dans un intervalle de temps donné, ne
dépendent pas de ce qui s’est passéauparavant : le phénomène est sans
mémoire.
- Plus cet intervalle de temps est petit, moins il y a de chance de voir Ase
produire et Ane se produit pas deux fois presque en même temps : Aest un

Simulation d’un processus de Poisson
2–Modèle probabiliste et résultats théoriques
Transformer ces hypothèses de nature heuristique en énoncés abstraits adaptés
aux outils probabilistes.
Hypothèses de modèle continu :
Ω est l’ensemble continu de tous les instants oùApeut théoriquement se produire
àpartir d’un instant initial 0. Ω = ] t0, +∞[.
1) La probabilitéque Ase produise dans un intervalle de temps ]t, t + ∆t] ne
dépend que de ∆t (phénomène homogène). Soit p = P(∆t) cette probabilité.
2) Les apparitions de Adans deux intervalles de temps disjoints sont des
événements indépendants (phénomène sans mémoire).
3) On suppose que P(∆t) ~∆t quand ∆t 0, où> 0 est une constante (les
événements Asont rares).
Cette situation est caractérisée par le paramètre qui peut être estiméàpartir
d’une statistique : on peut observer que, dans des conditions analogues, Ase
produit en moyenne fois dans un intervalle de temps unité(cadence du
phénomène).

Simulation d’un processus de Poisson
La théorie probabiliste permet de déterminer :
-la loi du temps d’attente X1du premier événement A,
-la loi du temps d’attente Zrdu rième événement A,
-la loi du nombre N d’événements Aqui se sont produits dans une durée [0, ].
Cette situation peut être décrite par un schéma (processus) de Poisson :
A1…Ar…AN
0 t1t2t
X1X2…
Zr
- densitéde la loi de X1: fT(t) = , pour t ≥0. On a E[X1] = 1/ . C’est la loi
exponentielle de paramètre .
-densitéde la loi de Zr: , pour z ≥0. On a E[Zr] = r/ .
C’est la loi gamma (r, ).
- La loi de N est donnée par les probabilités élémentaires :
P(N = k) = , pour k IN. On a E[N] = et Var(N) = .
C’est la loi de Poisson de paramètre .
et
fZr(z)rzr1ez
(r1)!
()k
k ! e
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%