Dynamique de particules autopropulsées

Master Science de la matière Stage 2014–2015
École Normale Supérieure de Lyon Guillaume Fabre
Université Claude Bernard Lyon I M2 Physique
Dynamique de particules autopropulsées
Résumé :
Les mouvements collectifs, comme des vols d’oiseaux ou des bancs de poissons, sont des exemples
de phénomènes émergeant spontanément. Au cours des dernières années, ces systèmes ont intéressé
les physiciens qui les ont décrits comme de la matière active. À l’aide d’un système de colloïdes au-
topropulsés, manipulés au sein de dispositifs microfluidiques, nous étudions la dynamique collective
de particules actives. Au delà d’une densité critique, ces populations colloïdales s’auto-organisent
pour former des troupeaux macroscopiques. Au sein de ses troupeaux, leur mouvement est dirigé
le long d’une direction moyenne bien définie. La question centrale abordée dans ce rapport est
l’étude de cette transition dynamique dite de flocking. En particulier, je fournis une caractérisation
expérimentale de la dynamique et de la morphologie des excitations propagatives émergentes au
voisinage de la transition.
Mots clefs :colloïdes auto-propulsés, micro-fluidique, marcheurs aléatoires, mouvement
collectif
Stage encadré par :
Denis Bartolo
[email protected] / tél. (+33) 4 72 72 84 92
Laboratoire de Physique de l’ENS de Lyon
46 Allée d’Italie
69007, Lyon
https://denis114.wordpress.com
31 juillet 2015

Remerciements
Tout d’abord, je voudrais remercier l’ensemble du laboratoire de Physique de l’ENS de Lyon, secrétaires,
permanents, doctorants et post-doc, pour l’accueil et l’ambiance chaleureuse qui règnent entre ces murs.
Then, I’d like to thank Joost and Tess, and all the members of the Bartolo group meeting lunch, it
was a pleasure to share those meals with you and have a drink from time to time.
I’d like to thank Vijay, who taught me all the experimental skills I needed for the experiments.
Merci aussi à Jean-Baptiste Caussin, qui m’a éclairé sur de nombreux points théoriques. Tes futurs
élèves ne le savent pas encore, mais ils ont de la chance de t’avoir comme professeur !
Une standing ovation pour Alon Gal, notre fameux DJ de la salle 163, qui a (presque) réussi à pythonisé
notre équipe.
Je tiens à remercier tout particulièrement Alexandre Morin, avec qui ce fut un réel plaisir de travailler
sur ces expériences. J’ai passé vraiment de super moments avec toi et Céleste Odier, lors de nos pauses
Coca de 16h00, nos sessions salle blanche, le grass-volley, et j’en passe. Céleste qui participe toujours
à la bonne humeur au sein du labo, et qui veille à ce que les stagiaires fassent des gâteaux pour mieux
souder le groupe ;) J’espère bien qu’on se reverra de temps en temps tous les trois quand je passerai
sur Lyon.
Enfin, je voudrais remercier infiniment Denis qui m’a permis de découvrir le monde de la matière active
via une expérience extrêmement intéressante. J’ai appris de nombreuses choses à tes côtés et ce fut un
honneur de travailler dans ton groupe. En plus des discussions passionnantes, tu as toujours eu un mot
pour faire rire, et je me suis vraiment amusé lors de ces 4 mois qui sont passés très (trop) vite.
Table des matières
I Stratégie et design de l’expérience 1
1 Introduction et motivations 1
1.1 Mouvement collectif et matière active ............................ 1
1.2 Population de rouleurs colloïdaux .............................. 1
1.3 Ma contribution lors de ce stage ............................... 2
2 Motorisation des colloïdes par effet Quincke 2
2.1 Rotation spontanée par effet Quincke ............................ 3
2.2 De la rotation à la translation ................................ 4
3 Dispositifs expérimentaux 4
3.1 Préparation des dispositifs microfluidiques ......................... 4
3.1.1 Création du canal par ruban adhésif ........................ 4
3.1.2 Contrôle de la géométrie : lithographie optique .................. 5
3.1.3 Connexions électriques et microfluidiques ..................... 6
3.2 Préparation des solutions de colloïdes ............................ 7
3.2.1 Préparation du solvant ................................ 7
3.2.2 Lavage des colloïdes ................................. 7
3.3 Acquisition et traitement d’images ............................. 7
3.3.1 Acquisition ...................................... 7
3.3.2 Tracking de particules ................................ 8
II Dynamique individuelle des particules : marcheurs aléatoires persistants 9
4 Objectifs 9

Dynamique de particules autopropulsées Guillaume Fabre
5 Caractérisation expérimentale des trajectoires 9
5.1 Vitesse des rouleurs colloïdaux ............................... 9
5.2 Diffusion orientationnelle ................................... 10
6 Un modèle théorique minimal 11
6.1 Origine de la diffusion orientationnelle ........................... 11
6.1.1 Diffusion due au mouvement Brownien ....................... 11
6.1.2 Hypothèse de diffusion par impuretés ........................ 12
6.2 Caractérisation de la marche aléatoire ........................... 13
6.2.1 Comportement balistique aux temps courts .................... 13
6.2.2 Comportement diffusif aux temps longs ...................... 14
III Emergence de mouvements collectifs 14
7 Objectifs 15
8 Caractérisation de l’état bande 15
8.1 Influence de la concentration en colloïdes .......................... 16
8.1.1 Diagramme de phase ................................. 16
8.1.2 Excitation propagative ................................ 17
8.1.3 Morphologie de la bande ............................... 18
8.2 Influence du champ électrique ................................ 19
8.2.1 Morphologie et dynamique de la bande ....................... 19
8.3 Longueur de la bande .................................... 20
9 Perspectives 21
9.1 Dynamique individuelle : Influence d’obstacles ....................... 21
9.2 Mouvement collectif ..................................... 22
A Mise en équation de l’effet Quincke 24
B Mise en équation de la diffusion rotationnelle 25
C Impact des conditions aux limites : diagramme de phase hystérétique 26
3

Dynamique de particules autopropulsées Guillaume Fabre
Première partie
Stratégie et design de l’expérience
1 Introduction et motivations
1.1 Mouvement collectif et matière active
Les mouvements collectifs les plus impressionnants proviennent des animaux qui s’organisent et se
déplacent de manière cohérente à l’échelle du groupe. Des comportements collectifs émergents sont
observés à toutes les échelles, depuis les bactéries (de l’ordre du mm) jusqu’aux essaims de criquets
(allant jusqu’au km) en passant par les bancs de poissons (de l’ordre de la dizaine de mètres). Ces
individus motiles peuvent se regrouper et suivre une même direction. Ce mouvement collectif est
surprenant car il ne repose pas sur l’existence d’un leader ou d’une force extérieure mais il découle
d’interactions locales simples.
Dans les années 90, les physiciens se sont penchés sur des modèles théoriques pour expliquer l’émer-
gence de ces mouvements collectifs, à l’instar de la transition d’un matériau magnétique entre un état
paramagnétique (désordonné) et un état ferromagnétique (ordonné).
Les travaux pionniers de Vicsek et al [1], prenant en compte uniquement une simple règle d’alignement
local des vitesses pour des particules autopropulsées, ont montré l’émergence de mouvements collectifs
et ont permis le développement de nombreux travaux dans le domaine de la matière active.
La matière active est définie comme étant composée de particules individuelles se déplaçant seules
grâce à la conversion d’énergie, injectée à l’échelle microscopique, en mouvement. Dans le cas où les
corps motiles sont dotés d’interactions locales d’alignement des vitesses, on parle alors de matière active
polaire.
Peut-on alors décrire ces groupes d’individus mobiles comme des matériaux actifs ?
Plus récemment, au cours des 5 dernières années, les expérimentateurs ont proposé une démarche en
un sens dual, à savoir créer une matière active à partir de foules de particules autopropulsées.
Durant ce stage, j’ai réalisé des expériences sur un de ces matériaux : une assemblée de rouleurs
colloïdaux.
1.2 Population de rouleurs colloïdaux
En un mot, l’expérience consiste en l’étude de la dynamique collective de particules autopropulsées par
effet Quincke qui est présenté dans la partie 2.1. Afin de mieux contextualiser mon stage, je résume
brièvement les résultats obtenus précédemment et les questions ouvertes.
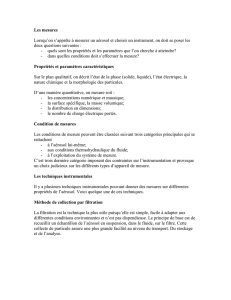
Dans l’article [2], l’émergence de mouvement collectif au sein d’une phase gaz (1b) a été observée.
Une bande (1c) se forme lorsque la concentration augmente, jusqu’à devenir une phase liquide polaire
(1d). Le diagramme de phase du système est présenté en figure 1e. Ce diagramme est cohérent avec
les observations de Vicsek (figure 1a) pour des particules se déplaçant à vitesse constante avec des
interactions d’alignement local.
Ainsi, à faible concentration, nous avons des particules qui se déplacent aléatoirement. En augmentant
la concentration, des bandes de particules apparaissent et se déplacent collectivement au sein d’une
phase isotrope. Puis en augmentant encore la concentration, les bandes s’étalent et le système s’auto-
organise en un liquide polaire homogène.
De manière surprenante, bien que les degrés de liberté des particules ne soient pas couplés à l’émergence
du mouvement collectif, le système se sépare en deux phases : une bande (goutte liquide polaire) qui
coexiste avec le gaz.
Les bandes ont été observées expérimentalement pour les rouleurs colloïdaux [2], des filaments d’actine
[3] ou numériquement dans [4], cependant elles restent mal caractérisées et mal comprises. Quel mé-
canisme fixe la taille caractéristique de ces bandes ? Leurs vitesses ? Quelle est la forme typique d’une
bande ? Plusieurs bandes peuvent-elles coexister ?
1

Dynamique de particules autopropulsées Guillaume Fabre
a
Figure 1: a.Schéma des différents motifs observés dans le modèle de Vicsek : phase gaz désordonnée,
bandes propagatives et liquide polaire. Illustration expérimentale de ces motifs, Bricard et al. [2] : b.
gaz c.bande d.liquide polaire e.Diagramme de phase du système avec la polarisation Π=v/v0en
fonction de la concentration en colloïdes.
1.3 Ma contribution lors de ce stage
Ma contribution principale a été la caractérisation expérimentale la plus exhaustive possible des mo-
tifs de propagation observés dans les populations de rouleurs colloïdaux. Grâce à des techniques de
microfluidique, d’imagerie rapide et de suivi de particules, j’ai pu étudier ces particules actives.
Après avoir caractérisé quantitativement la dynamique des rouleurs isolés, section 5, je me suis intéressé
aux paramètres de contrôle de ces marcheurs aléatoires persistants, section 6.
Ensuite, j’ai pu montrer comment la taille des bandes était fixée par les deux seuls paramètres de
contrôle du système, à savoir la concentration en colloïdes, section 8.1, et l’intensité du champ élec-
trique, section 8.2, qui sert à leur propulsion.
Contrairement à ce qui avait été dit dans [2], ces bandes présentent une longueur intrinsèque et elle
n’est pas fixée par la taille du système comme le serait un volume de liquide coexistant avec un gaz,
section 8.3.
Dans une image de séparation de phase, ces états bandes apparaissent donc comme étant des mi-
crophases, à l’instar de smectiques qui possèdent une largeur caractéristique, et contrairement à la
démixtion où le volume qu’occupe les phases dépend de leurs compositions relatives.
J’ai enfin comparé les résultats quantitatifs obtenus à un modèle théorique récent [5], fournissant un
accord prometteur pour la compréhension de ces bandes.
2 Motorisation des colloïdes par effet Quincke
Dans cette section, nous allons nous intéresser à l’autopropulsion des particules et la technique per-
mettant de les rendre actives.
2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
1
/
30
100%