ISCID - PRÉPA 2ème année MATHÉMATIQUES APPLIQUÉES À L

ISCID - PRÉPA 2ème année
MATHÉMATIQUES APPLIQUÉES À L’ÉCONOMIE ET À LA GESTION 2
Université du Littoral - Côte d’Opale
Laurent SMOCH
Septembre 2012
Laboratoire de Mathématiques Pures et Appliquées Joseph Liouville
Université du Littoral, zone universitaire de la Mi-Voix, bâtiment H. Poincarré
50, rue F. Buisson, BP 699, F-62228 Calais cedex


Table des matières
1 Calcul matriciel 1
1.1 Lesmatrices.............................................. 1
1.2 Calcul pratique d’un déterminant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Systèmes linéaires 12
2.1 Intersection de droites et de plans . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Ensembledessolutions........................................ 14
2.3 Transformations équivalentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4 Formeéchelonnée........................................... 17
2.5 Formerésolue............................................. 20
2.6 LesformulesdeCramer ....................................... 26
2.7 Calcul de l’inverse de A....................................... 28
I

II TABLE DES MATIÈRES

Chapitre 2
Systèmes linéaires
2.1 Intersection de droites et de plans
Une équation linéaire à deux inconnues, du type a1x+a2y=b, est l’équation d’une droite dans le plan.
Plus précisément, si a1,a2et bsont des réels fixés, tels que a16= 0 ou a26= 0, l’ensemble des couples (x, y)
vérifiant a1x+a2y=best une droite affine. Chercher les couples (x, y)qui vérifient plusieurs équations du
même type, c’est chercher les points communs à plusieurs droites affines. Voici trois exemples de systèmes
de 3 équations à 2 inconnues.
x−y=−1
x+y= 1
y= 2
,
x−y=−1
x+y= 1
y= 1
,
x−y=−1
2x−2y=−2
−x+y= 1
.
Le premier n’a pas de solution. Le second a une solution unique : la solution de ses deux premières équa-
tions vérifie la troisième. Le troisième système a une infinité de solutions : ses trois équations sont équivalentes.
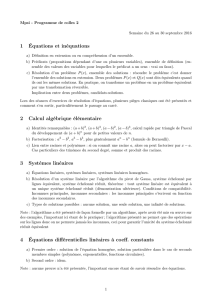
La FIGURE 2.1 donne une interprétation géométrique des trois systèmes. Dans chacun des trois graphiques,
D1,D2,D3sont les droites correspondant aux trois équations du système. Résoudre un système de méqua-
tions à 2 inconnues, c’est déterminer l’intersection de mdroites dans le plan. Elle peut être vide, réduite à
un point, ou égale à une droite.
Figure 2.1 – Interprétations géométriques de 3 systèmes linéaires de 3 équations à 2 inconnues.
Une équation linéaire à trois inconnues x,y,zest l’équation d’un plan dans l’espace. Voici trois systèmes de
deux équations à trois inconnues.
x+y+z= 1
−x−y−z=−1,x+y+z= 1
−x−y−z= 1 ,x+y+z= 1
x−y+z=−1.
Les deux équations du premier système représentent le même plan. L’ensemble des solutions du système
est ce plan. Dans le second système, les équations sont celles de deux plans parallèles : leur intersection est
12
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%