1S Phys3 TP Représentation d`un vecteur vitesse. V V V V

1S Phys3 TP Représentation d’un vecteur vitesse.
Connaître la valeur de la vitesse d’un mobile à un instant donné est une indication précieuse mais insuffisante : pour
se faire une idée précise du mouvement de ce mobile, il faut aussi savoir dans quelle direction il se déplace et dans
quel sens le long de cette direction, d’où l’utilisation du vecteur vitesse !
Pour un point mobile, à un instant donné, nous définirons ainsi les caractéristiques du vecteur vitesse :
Vecteur Vitesse
V
à la date t
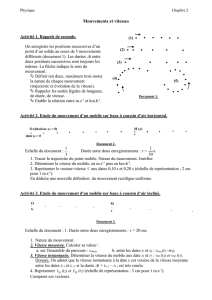
Nous allons étudier, dans le référentiel terrestre, le mouvement de 2 points particuliers d'un mobile autoporteur
lancé sur une table horizontale:
Le mouvement du centre de la base du mobile: C
Le mouvement d’un point de la périphérie : P
Tracer les trajectoires de ces 2 points C et P.
Noter la durée Δt entre 2 impulsions (2 points consécutifs)
Noter l’échelle utilisée.
Donner la nature de la trajectoire de C dans le référentiel terrestre.
Donner la nature de la trajectoire de P dans le référentiel terrestre.
Pour le point C : Calculer les valeurs des vitesses VC1 , ,VC7 et VC16
Représenter les vecteurs vitesse
1
c
V
,
7
c
V
et
16
c
V
(Echelle : 1cm pour 0,25 m.s-1)
Pour le point P : Calculer les valeurs des vitesses VP1 , VP7 et VP16
Représenter les vecteurs vitesse
1
P
V
,
7
P
V
et
16
P
V
(Echelle : 1cm pour 0,25 m.s-1)
Conclusion
Quels sont les mouvements: du point C ? du point P ?
Tous les points d'un solide lancé sur une table horizontale ont-ils le même mouvement?
Quel est de tous les points du solide celui qui a le mouvement le plus simple ?
Comment pourrait-on représenter les vecteurs vitesse pour un mouvement rectiligne uniforme ?
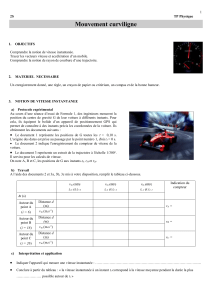
Tracer la trajectoire.
Repérer la durée Δt entre 2 impulsions.
Noter l’échelle utilisée.
Donner la nature de la trajectoire de : Go à G14 : (A) et G14 à G20 : (B).
Pour A: Représenter
2
V
,
6
V
,
9
V
, en déduire la nature du mouvement (Echelle : 1cm pour 0,5 m.s-1)
Trouver le centre 0 du cercle trajectoire. Pour cela tracer la médiatrice des segments : [GO,G2]
;[G2,G4];[G4,G6];[G6,G8]
Mesurer l'angle G0OG3 et calculer la longueur de l'arc G0G3
Mesurer l'angle G5OG8 et calculer la longueur de l'arc G5G8
Déterminer la vitesse angulaire w
Que peut-on dire de la vitesse angulaire w ?
Comparer le produit (R x w) et les valeurs des vitesses linéaires V2, V6 et V9.
Pour B: Représenter
16
V
et
19
V
(Echelle : 1cm pour 0,25 m.s-1)
Que peut-on dire des vecteurs vitesse sur chacune des 2 parties de la trajectoire?
Conclure quant au mouvement sur chacune des 2 parties.
Enre
g
istrement n° 2 : Etude du mouvement du centre d'inertie G du mobile
.
Le mobile étant d'abord relié par un fil à un pivot fixe puis, entre G14 et G15 la liaison avec le pivot cesse
brusquement
Enregistrement n° 1 :
voir fiche
annexe 1
.
direction : tangente à la trajectoire
sens : le sens du mouvement
valeur : vitesse instantanée à la date t
OBJECTIFS:
Savoir comment on réalise des enregistrements de mouvements simples.
Savoir déterminer la nature des mouvements étudiés.
Mesurer des vitesses en utilisant les enregistrements.
Représenter des vecteurs vitesse avec une échelle.
Montrer que l'un des points du mobile a un mouvement simple.
MATÉRIEL :
Mobiles autoporteurs (mobiles sur coussin d'air),
table horizontale et générateur d'impulsion, papier
pour enregistrement, pivot et axe rigide, niveau à
bulle et double décimètre, 1 rapporteur.

Δt = 60 ms
Echelle 1/2
1
/
2
100%