Approximation par la méthode des moindres carrés d`un probl`eme

Mediterranean Conference on Biomathematics June 25-28, 2007 French University in Cairo
Approximation par la m´ethode des moindres carr´es d’un
probl`eme bidimensionnel stationnaire d’interaction
fluide-structure
Ibrahima Mbaye, Laboratoire de Math´ematiques, Informatique et Applications, Universit´e de
Haute-Alsace, 4 rue des Fr`eres Lumi`ere, 68093 Mulhouse Cedex, France
Cornel Murea, Laboratoire Math´ematiques, Informatique et Applications, Universit´e de
Haute-Alsace, 4 rue des Fr`eres Lumi`ere, 68093 Mulhouse Cedex, France
Keywords : Interaction Fluide-Structure, calcul du gradient analytique, algorithme BFGS.
Dans cette note, on ´etudie un probl`eme bidimensionnel stationnaire d’interaction fluide-structure. Le
fluide est mod´elis´e par les ´equations de Stokes et la structure est repr´esent´ee par un mod`ele de poutre.
On transforme la condition de couplage concernant la continuit´e des contraintes normales `a l’interface par
la m´ethode des moindres carr´es. On propose une m´ethode num´erique de r´esolution du probl`eme coupl´e
fluide-structure qui s’appuie sur l’algorithme d’optimisation BFGS. Une transformation ALE explicite est
utilis´ee pour calculer le gradient analytique de la fonction coˆut. On pr´esente des r´esultats num´eriques.
1 Introduction
On ´etudie un probl`eme stationnaire d’interaction entre un fluide gouvern´e par les ´equations de Stokes
bidimensionnelles et une structure ´elastique mod´elis´ee par une ´equation monodimensionnelle de type
poutre. Les ´equations du fluide et celles de la structure sont coupl´ees par deux types de conditions aux
limites `a l’interface : continuit´e de vitesses (le fluide adh`ere aux parois ou d’une mani`ere ´equivalente, les
vitesses du fluide et de la structure sont ´egales `a l’interface) et continuit´e de forces de surface (les forces
agissant `a l’interface sur la structure sont ´egales et de sens contraire aux celles qui agissent sur le fluide).
Plusieurs m´ethodes de r´esolution num´eriques ont ´et´e ´elabor´ees. La strat´egie de type point fixe a ´et´e utilis´ee
dans [1] et [2]. Pour acc´el´erer la convergence on peut utiliser : la relaxation [3], [4], la “transpiration”
[5], [6] ou la m´ethode d’Aitken [7].
La m´ethode de Newton avec le jacobien approch´e par des diff´erences finies a ´et´e utilis´e dans [8]. Dans [7]
le jacobien est remplac´e par un op´erateur plus simple et dans [9] le jacobien est ´evalu´e exactement.
Une approche d´ecomposition de domaine avec pr´econditionnement est propos´e dans [10].
Le principal d´esavantage des algorithmes de point fixe ou de Newton est que le point d’initialisation doit
ˆetre “proche” de la solution.
Dans cette note, on transforme la condition de couplage concernant la continuit´e des contraintes nor-
males `a l’interface par la m´ethode des moindres carr´es. Pour r´esoudre num´eriquement le probl`eme
d’optimisation ainsi obtenu, on utilise la m´ethode BFGS (Broyden, Fletcher, Goldforb, Shono) qui
n´ecessite le calcul du gradient de la fonction coˆut `a chaque it´eration.
Trouver la forme analytique du gradient est en g´en´eral une tˆache difficile car on doit faire des d´erivations
par rapport au domaine. Dans cette note, en utilisant une transformation ALE (Arbitrary Lagragian
Eulerian) explicite, on donne la forme analytique du gradient qui est ais´ement mise en oeuvre num´erique.
Concernant la vitesse de convergence dans un cadre g´en´eral, la m´ethode de Newton est plus rapide que
l’algorithme BFGS, qui est plus rapide que l’algorithme de type point fixe. Mais, contrairement aux deux
autres m´ethodes, l’algorithme BFGS est moins sensible au point de d´epart, ce qui repr´esente un avantage
important de cette approche.
2 Pr´esentation du probl`eme coupl´e
Soient Let Hdeux constantes positives. D´esignons par ud´efinie de [0, L] dans Rle d´eplacement transver-
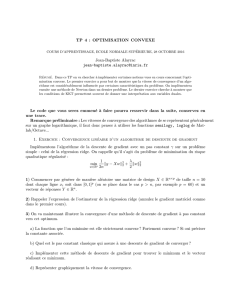
sal d’une structure ´elastique. On consid`ere un fluide incompressible qui occupe le domaine ΩF
udans R2de
fronti`ere ∂ΩF
u= Σ1∪Σ2∪Σ3∪Γuo`u Σ1est la section d’entr´ee du fluide, Σ2est une fronti`ere rigide, Σ3est
la section de sortie du fluide et Γu=(bx1, H +u(bx1)) ∈R2;bx1∈[0, L]est l’interface fluide-structure
qui d´epend du d´eplacement u. On note par Γ0la fronti`ere rigide de la configuration de r´ef´erence (voir
Fig. 1).
Soit fFles forces externes appliqu´ees au fluide, nest le vecteur ext´erieur unitaire normal `a la fronti`ere
et e2= (0,1)Test le vecteur unitaire dans la direction de l’axe des ordonn´ees.
1

x1
H
x2
L
u
Σ3
Σ1
Γ0
ΩF
u
Σ2
Γu
Figure 1: Domaine ΩF
uoccup´e par le fluide (Σ2est l’axe de sym´etrie).
D´esignons par v= (v1, v2) d´efini de ΩF
udans R2la vitesse de l’´ecoulement et par pd´efinie de ΩF
udans R
la pression.
Le probl`eme coupl´e est : trouver (u, v, p) tel que
u0000 (bx1) = 1
D−(σ(p, v)·n)·~e2p1 + (u0(bx1))2(1)
u(0) = u(L) = u0(0) = u0(L) = 0 (2)
−µ∆v+∇p=fF,dans ΩF
u(3)
∇ · v= 0,dans ΩF
u(4)
v=gin,sur Σ1(5)
v·n= 0,sur Σ2(6)
∂v1
∂x2
= 0,sur Σ2(7)
−pIn +µ∂v
∂n = 0,sur Σ3(8)
v= 0,sur Γu.(9)
Le param`etre µrepr´esente la viscosit´e du fluide, D=Eh3
12 est une constante li´ee `a la structure, Eest le
module de Young, hest l’´epaisseur de la structure. On note par 0la d´eriv´ee par rapport `a bx1.
La structure est gouvern´ee par (1)–(2) et les ´equations (3)–(9) mod´elisent le fluide. Il s’agit d’un probl`eme
coupl´e fluide-structure parce que, d’un cot´e, le d´eplacement de la structure d´epend de la pression du fluide
`a l’interface et de l’autre cot´e, le domaine occup´e par le fluide d´epend du d´eplacement de la structure.
Remarque 1
−(σ(p, v)·n)·~e2p1 + (u0(bx1))2=p(bx1, H +u(bx1)) + µu0(bx1)∂v1
∂x2
+∂v2
∂x1−2∂v2
∂x2|Γu
.
Dans la suite on n´eglige le terme µhu0(bx1)∂v1
∂x2+∂v2
∂x1−2∂v2
∂x2i|Γu
par rapport aux forces de pression
p(bx1, H +u(bx1)).
3 Formulation du probl`eme d’optimisation
Dans la suite, la pression `a l’interface sera approch´ee par :
p(bx1, H +u(bx1)) ≈
m
X
i=1
αiφi(bx1)∀bx1∈[0, L],(10)
o`u φisont des fonctions de base de type ´el´ements finis, α= (α1,...,αm)∈Rmest le vecteur `a trouver.
2

On introduit le probl`eme d’optimisation suivant :
inf
αJ(α) = ZL
0 m
X
i=1
αiφi(bx1)−p(bx1, H +u(bx1))!2
dbx1,(11)
le d´eplacement de la structure uest la solution de
u0000(bx1) = 1
D m
X
i=1
αiφi(bx1)!,∀bx1∈[0, L] (12)
avec les conditions (2);
la vitesse et la pression du fluide vet psont solutions du probl`eme (3)–(9).
Le vecteur αa la signification d’un contrˆole virtuel dans le sens de l’article [11].
Remarque 2 On doit pr´eciser que le problme d’optimisation n’est pas ´equivalent au syst`eme (1)–(9), mais
si la valeur optimale de la fonction coˆut est proche de z´ero, alors le probl`eme d’optimisation approche
d’une mani`ere convenable le probl`eme coupl´e initial.
4 La forme analytique du gradient de la fonction coˆut
On introduit : a11(α) = H+u
H,∂a11(α)
∂αk
=1
H
∂u
∂αk
, a12(α) = u0
Hx2,∂a12(α)
∂αk
=1
H
∂u0
∂αk
x2.
Soient les formes suivantes :
aF(v, w) = ZΩF
u
µ∇v· ∇w dx, bF(w, q) = −ZΩF
u
(∇ · w)q dx,
γ(w) =
2
X
i=1 ZΩF
u
1
a11(α)
∂a11(α)
∂αk
fF
iwidx
+ZΩF
u
µ1
a11(α)
∂a11(α)
∂αk
∂w1
∂x1
−1
a11(α)
∂a12(α)
∂αk
−1
a2
11(α)
∂a11(α)
∂αk
a12(α)∂w1
∂x2p dx
−
2
X
i=1 ZΩF
u
µ1
a11(α)
∂a11
∂αk
∂vi
∂x1
∂wi
∂x1
−1
a11(α)
∂a12(α)
∂αk
−1
a2
11(α)
∂a11(α)
∂αk
a12(α)∂vi
∂x1
∂wi
∂x2dx.
Proposition 1 Les applications α∈Rm7→ v∈(H1(ΩF
u))2et α∈Rm7→ p∈L2(ΩF
u)/Rsont
diff´erentiables et leurs d´eriv´es partielles ∂v
∂αk∈(H1
0(ΩF
u))2et ∂p
∂αk∈L2(ΩF
u)/Rv´erifient le syst`eme
suivant : (aF(∂v
∂αk, w) + bF(w, ∂p
∂αk) = γ(w),∀w∈(H1
0(ΩF
u))2
bF(∂v
∂αk, q) = 0,∀q∈L2(ΩF
u)/R.(13)
La d´eriv´ee de Jpar rapport αkest donn´ee par :
∂J
∂αk
(α) = 2 ZL
0 m
X
i=1
αiφi(bx1)−p(bx1, H +u(bx1))!×φk(bx1)−∂p(bx1, H +u(bx1))
∂αkdbx1
Remarque 3 Pour calculer le gradient, on doit r´esoudre :
a) 1 probl`eme structure (1) avec les conditions (2) pour calculer u,
b) 1 probl`eme fluide (3)–(9) pour calculer vet p,
c) m probl`emes fluide (12) pour calculer ∂v
∂αket ∂p
∂αk,i= 0,...,m. Mais les msyst`emes lin´eaires obtenus
apr`es la discr´etisation de (12) par ´el´ements finis ont la mˆeme matrice, qui est identique a celle du probl`eme
variationnel pour r´esoudre (3)–(9).
Pour r´esumer, l’effort de calcul total pour b) et c) est ´equivalent `a la r´esolution d’un probl`eme variationnel
de type Stokes avec m+ 1 second membres diff´erents.
Dans [12], les ´equations du gradient analytique sont ´ecrites dans un domaine de r´ef´erence, qui n´ecessite
un calcul suppl´ementaire pour l’assemblage de la matrice. Par contre, si on emploie (12), on peut utiliser
des codes de calcul d´ej`a existants pour l’assemblage de la matrice.
3

5 R´esultats num´erique
Le domaine dans lequel l’´ecoulement se produit a une longueur L= 3 cm et une hauteur H= 0.5cm. La
viscosit´e du fluide est µ= 0.035 g
cm·s, sa densit´e ρF= 1 g
cm3, les forces volumiques fF= (0,0). L’´epaisseur
de la structure h= 0.1cm, son module de Young E= 0.75 ·106g
cm·s2, sa densit´e ρS= 1.1g
cm3. Le profil
de vitesse sur Σ1est de la forme : g1
in(x1, x2) = v1(x1, x2) = (1 −x2
2
H2)V0et g2
in(x1, x2) = v2(x1, x2) = 0.
Le paramˆetre V0= 30 cm
sest la vitesse maximale du fluide `a l’entr´ee, gin = (g1
in, g2
in).On pose hf=L/40
la subdivision de la longueur Lde la structure.
La vitesse et la pression du fluide sont approch´ees en utilisant les ´el´ements finis de Lagrange d’ordre 2
(P2), respectivement d’ordre 1 (P1). Nous utilisons le logiciel FreeFem++ [13] pour les tests num´eriques.
La m´ethode BFGS est un algorithme it´eratif de type αk+1 =αk−θkHk∇J(αk). Le scalaire θkest la
solution d’un probl`eme d’optimisation unidimensionnel, la matrice Hkapproche l’inverse du hessien de J
et elle est calcul´ee par la formule Hk+1 =Hk+1 + γT
kHkγk
δT
kγkδkδT
k
δT
kγk−δkγT
kHk+HkγkδT
k
δT
kγko`u δk=αk+1 −αk
et γk=∇J(αk+1)− ∇J(αk).
5.1 Test dans le cas m= 3
Les fonctions φi
φ0(bx1) = −2x1
L+ 1,bx1∈[0, L/2]
0,bx1,∈[L/2, L]
φ1(bx1) = 2x1
L,bx1∈[0, L/2]
2−2x1
L,bx1∈[L/2, L]
φ2(bx1) = 0,bx1∈[0, L/2]
2x1
L−1,bx1∈[L/2, L]
La validation du gradient analytique se fait par comparaison avec un gradient obtenu par diff´erences
finies (DF).
α∇J(α) analytique ∇J(α) par DF
-20 -52.65 -52.92
-15 -30.13 -30.39
-10 -7.62 -7.86
-5 14.91 14.68
0 37.42 37.22
5 59.97 59.77
m hfJ(αini)J(αop)k ∇J(αop)k∞CPU time
3L/40 317.468 0.09340 9.487e-006 130.56s
4L/40 317.468 0.01520 9.060e-006 170.37s
7L/40 317.468 0.0055 2.102e-05 366.24s
10 L/40 317.468 0.0047 3.829e-05 526.06s
Table 1: Le gradient calcul´e analytiquement et par diff´erences finies (gauche). Les valeurs optimales
obtenues avec l’algorithme BFGS (droite) pour m= 3, m = 4, m = 7, m = 10.
Dans l’algorithme BFGS on utilise le test d’arrˆet k ∇J(α)k<10−5qui est r´ealis´e apr´es 10 it´erations. On
a pris comme point de d´epart α= 0.
4

0
5
10
15
20
25
0 0.5 1 1.5 2 2.5 3
pression
alpha*phi
Figure 2: Le cas m= 3. Pression `a l’interface et fonction d’approximation.
Figure 3: Le cas m= 3. D´eplacement du paroi et vitesse du fluide.
5.2 Test dans le cas m= 10
Les fonctions φi
On pose l=L/9.
φ0(bx1) = −x1+l
l,bx1∈[0, l]
0,bx1,∈[l, 9l]
φi(bx1) =
x1−(i−1)l
l,bx1∈[(i−1)l, il]
−x1−(i+1)l
l,bx1∈[il, (i+ 1)l]i= 1 8
0,ailleurs
φ9(bx1) = 0,bx1∈[0,8l]
x1−8l
l,bx1∈[8l, 9l]
m hfJ(αini)J(αop)k ∇J(α)k∞
10 L/40 317.468 0.0047 3.829e-005
10 L/60 316.071 0.0044 5.512e-05
10 L/80 315.802 0.0035 5.165e-005
10 L/90 315.484 0.0053 5.882e-005
Table 2: Le cas m= 10. Valeurs optimales obtenues pour divers hf.
La valeur optimale de la fonction coˆut est proche de z´ero, mˆeme si on utilise un nombre r´eduit de
contrˆoles (m= 10). On peut affirmer dans ce cas que le probl`eme d’optimisation approche d’une mani`ere
convenable le probl`eme coupl´e fluide-structure (1)–(9).
5
 6
7
6
7
1
/
7
100%