Commande adaptative des machines à courant alternatif

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Commande adaptative des machines à courant alternatif
1
Plan du cours
• Introduction
• Commande adaptative avec modèle de référence
• Adaptation paramétrique par utilisation de sorties auxiliaires
• Commande par mode de glissement

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Commande adaptative des machines à courant alternatif
2
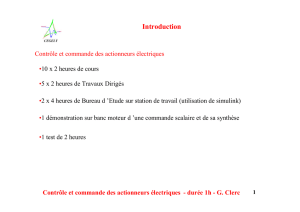
Perturbations
Variations paramétriques
Résistances
Mutuelles
saturation
Moteur
Commande RobusteContrôle adaptatif
Linéarisation
autour du
point de
fonctionnemen
t
Erreurs
d'observation
Introduction
Deux approches complémentaires :
Commande robuste :
Le régulateur est conçu pour être le moins sensible possible à son environnement : régulateur H
infinie, µ-synthèseð perte de performances.
Contrôle adaptatif :
Le régulateur s'adapte à son environnement.

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Commande adaptative des machines à courant alternatif
3
La commande adaptative est un ensemble de techniques utilisées pour l'ajustement en ligne et en
temps réel des régulateurs de boucle de commande de manière à réaliser ou à maintenir un certain
niveau de performances quand les paramètres du procédé à commander varient dans le temps ou
sont inconnus.
Définition (I.D. LANDEAU) :
Que peut faire un système adaptatif ?
1. Ajustement automatique des régulateurs : diminue le temps de configuration et améliore les
performances
2. Détermination des paramètres optimaux en fonction du point de fonctionnement (vitesse,
couple résistant ...)
3. Mise en oeuvre de régulateurs plus performants mais aussi plus complexes.
4. Maintien des performances du système de commande lorsque les caractéristiques du procédé
changent.
5. Détection de défauts par la mise en évidence de variations anormales des caractéristiques des
procédés
6. Utilisation conjointe avec les nouveaux procédés de commande (contrôle vectorielle ...) pour
améliorer leurs performances et leur robustesse.

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Commande adaptative des machines à courant alternatif
4
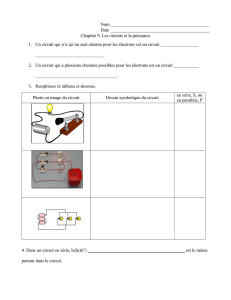
Principes de base
Calcul
du régulateurEstimation
Paramètres du processsus
RégulateurProcessus
Paramètres
du régulateur
u
c
uy
Calcul
du régulateur
RégulateurProcessus
Modèle de référence
+
-
+
-
u
cy
y
m
Paramètres
du régulateur
e
m
Commande adaptative
avec modèle de
référence
Régulateur auto-
ajustable

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Commande adaptative des machines à courant alternatif
5
Commande adaptative directe ou indirecte
Dans un schéma de commande adaptative directe, les paramètres du régulateur sont ajustés en
une seule étape.
Dans un schéma de commande adaptative indirecte, l'adaptation des paramètres se fait en deux
étapes :
• Estimation des paramètres du procédé
‚ Calcul des paramètres du régulateur à partir des paramètres estimés
Propriétés
Les lois d'ajustement rendent les commandes adaptatives non linéaires ðcalcul de stabilité,
commande non linéaire
Deux classes de problèmes :
•Auto-ajustement des paramètres : les paramètres sont fixes mais inconnus
‚Adaptation des paramètres : les paramètres changent
La commande adaptative peut être réalisée dans un environnement déterministe ou dans un
environnement stochastique. Dans ce cas , on ajouter au modèle de processus, un modèle de
perturbation.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1
/
32
100%