CHAPITRE 14 : OSCILLATEURS MECANIQUES FORCES

PCSI CHAPITRE 14 : OSCILLATEURS MECANIQUES FORCES 1/5
CHAPITRE 14 : OSCILLATEURS MECANIQUES FORCES
I. INTRODUCTION
Nous étudierons dans ce chapitre les oscillations forcées d’un système mécanique soumis à une
force sinusoïdale. Tout comme dans le cas des oscillations libres, les équations du mouvement de
ces oscillateurs auront la même structure que des équations d’évolution d’un circuit électrique en
régime forcé (analogie électro-mécanique). Les équations que nous rencontrerons ayant déjà été
étudiées au chapitre 10, nous ne nous attarderons pas sur leur interprétation.
II. ETABLISSEMENT DU REGIME FORCE
1) Equation du mouvement
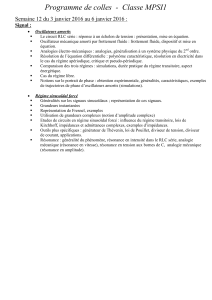
Figure 14.1. : Oscillateur mécanique amorti soumis à une force sinusoïdale
L’oscillateur mécanique à une dimension considéré est un point matériel de masse m pouvant
coulisser suivant l’axe x, relié à un ressort de raideur k et de longueur au repos 0
x
, soumis à la force
de rappel élastique
()
0x
kx x=− −Fe, à une force de frottement fluide x
x
α
α
=− =−fv e
et une
force excitatrice sinusoïdale
()
(
)
0cos
ex
tF t
ω
=Fe.
L’application du principe fondamental de la dynamique donne l’équation du mouvement :
() ()
0
ext 0
1 cos
F
k
x
Fxxxx t
mmmm
α
ω
=⇒=−−−+
∑
En posant 0km
ω
≡ la pulsation propre de l’oscillateur, m
τ
α
≡
un temps caractéristique
d’évolution du système (durée de relaxation), 0
0
1k
Qkm
τω α
ω
α
≡= = son facteur de qualité, et
0
X
xx=− , l’équation du mouvement devient :
() ()
2
000
0cos cos
FF
X
XX t t
Qmm
ω
ω
ωω
++= =
La solution X(t) de cette équation différentielle du second ordre est la somme d’une solution
générale X1(t) de l’équation sans seconde membre et d’une solution particulière X2(t) de l’équation
avec second membre.
L’équation sans second membre est connue et a déjà été étudiée à la section V du chapitre 3.
Rappelons que sa solution s’écrit :
• si Q est supérieur à 1/2 :
()
1
1
1
2cos
2a
tx
Xe t
τ
ω
ϕ
−∆
=
+ avec 2
0114
aQ
ωω
=−
• si Q est inférieur à 1/2 :
x
0
x
m
x
0
F
f
(
)
etF

PCSI CHAPITRE 14 : OSCILLATEURS MECANIQUES FORCES 2/5
1
1
2ttt
Xe xe xe
ββ
τ
+−
−−
⎡⎤
=+
⎣⎦
avec 02
11
4Q
βω
=
−
où les constantes se trouvent avec les conditions initiales. Au delà d’une durée égale à quelques fois
τ
, 1
X
devient négligeable.
Si la force appliquée est sinusoïdale de pulsation
ω
, il est évident qu’il existe une solution
particulière sinusoïdale. On a donc :
() ()
2
2cos
2
x
Xt t
ω
ϕ
∆
=
+
2) Régime transitoire
Lorsque t est proche de la date initiale, le régime de fonctionnement de l’oscillateur est en régime
transitoire, dans lequel la solution générale
X = X1(t) + X2(t)
est valable. Après quelques fois
τ
, 1
X
devient négligeable et l’oscillateur est en régime forcé :
(
)
(
)
1
X
tXt=
Nous étudierons dans la suite uniquement ce régime forcé.
III. RESONANCE
1) Notation complexe
L’évolution de l’abscisse de l’oscillateur étant sinusoïdale, il est fructueux de considérer la grandeur
complexe :
i
met
XX
ω
= avec i
mm
eXX
ϕ
= et
X
X= ;
(
)
arg X
π
ϕ
=± ±
d’après les signes des parties réelles et imaginaires de
X
. L’équation du mouvement complexe
devient alors :
2i
00
0et
F
XXX
Qm
ω
ω
ω
++=
Cette équation est l’analogue de l’équation d’évolution de la charge du condensateur dans un circuit
R,L,C série en régime sinusoïdal forcé (voir chapitre 10) :
2
00
0
jt
F
qqqe
Qm
ω
ω
ω
++=
La dérivation temporelle est triviale et ramène cette équation à une équation algébrique sur le corps
des nombres complexes :
00
m2
22 00
0
11
1
ii
FQF
Xmm
Q
Q
ωω χω
ωω χ
χ
==
⎛⎞
−+ −+
⎜⎟
⎝⎠
où on a posé la pulsation réduite : 0
χ
ωω
≡
et où on a factorisé le dénominateur par 2
0Q
χω
. En
passant en notation a + ib :
0
m22
0
2
1i
11
QQF
Xm
Q
χ
χ
χω
χ
χ
⎛⎞
−−
⎜⎟
⎝⎠
=⎛⎞
−+
⎜⎟
⎝⎠

PCSI CHAPITRE 14 : OSCILLATEURS MECANIQUES FORCES 3/5
2) Elongation
Il vient, pour l’expression de l’amplitude de l’élongation :
()
1/2
21/2
2
2 222
00
mm 22
00
111
QF QF
XX Q Q
mm
χχχ
χχω ω
−−
⎡⎤
⎛⎞ ⎡⎤
== −+ = −+
⎢⎥
⎜⎟ ⎢⎥
⎣⎦
⎝⎠
⎢⎥
⎣⎦
L’homogénéité est visible en se rappelant que 2
0mk
ω
=
et que la force de rappel élastique s’écrit
kx−. L’amplitude de l’élongation est égale à 2
0
QF m
ω
lorsque 1
χ
=
.
Le déphasage de l’élongation par rapport à la force excitatrice s’écrit quant à lui :
()
()
2
2
1
arctan 1 arctan si 1
1
arctan si 1
1
QQ
Q
χ
χχ
χχ
ϕ
χ
πχ
χ
⎧⎛⎞
⎛⎞
⎡⎤
⎛⎞
⎪⎜⎟
−−=− ≤
⎜⎟
⎢⎥
⎜⎟
⎜⎟
⎜⎟
−
⎪⎝⎠
⎣⎦
⎝⎠
⎪⎝⎠
=⎨⎛⎞
⎪⎜⎟
−− ≥
⎪⎜⎟
−
⎪⎝⎠
⎩
Il est égal à 2
π
− lorsque 1
χ
=. Etudions le comportement asymptotique de l’élongation :
0
1
χ
ωω
⇔ :
()
1/2
222
00
m22
0
00
0
12
arctan 0
QF F
XQ Q mm
Q
χ
χ
χωω
χ
ϕ
−
→
→
⎧⎡⎤
+− →
⎪⎣⎦
⎪
⎨⎛⎞
⎪=− →
⎜⎟
⎪⎝⎠
⎩
0
1
χ
ωω
⇔ :
0
m22
0
0
1
arctan
F
Xm
Q
χ
χ
χω
ϕ
ππ
χ
→∞
→∞
⎧→
⎪
⎪
⎨⎛⎞
⎪
−
+→−
⎜⎟
⎪⎝⎠
⎩
L’élongation est maximale (résonance en élongation) si le dénominateur est minimal :
()
()
2
222
22
222
2
10
10
dQ
d
dQ
d
χχ
χ
χχ
χ
⎧⎡⎤
−
+=
⎪⎢⎥
⎣⎦
⎪
⎨
⎪⎡⎤
−
+>
⎢⎥
⎪⎣⎦
⎩
Ces équations donnent :
2
0
22
11
11
22
r
QQ
χωω
=− ⇔ = − et 2
84Q>
La première équation indique donc qu’il ne peut y avoir résonance que si 12Q> et la deuxième
permet de vérifier que l’extremum correspond à un maximum dans ces conditions. Si la résonance
en élongation existe, la valeur maximale de l’amplitude d’oscillation est :
1/ 2
0
m, 22
0
1
14
r
QF
XQm
ω
−
⎡⎤
=−
⎢⎥
⎣⎦
Le déphasage est, à la résonance :
(
)
2
arctan 4 2
rQ
ϕ
=
−−
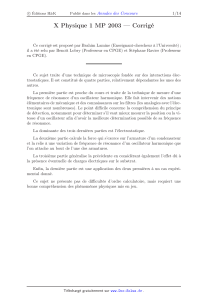
On a retrouvé dans ce paragraphe l’analogue de la résonance en tension aux bornes du condensateur
d’un circuit R,L,C en régime forcé (figure 14.2.).

PCSI CHAPITRE 14 : OSCILLATEURS MECANIQUES FORCES 4/5
Figure 14.2.a. : Allure de la courbe
(
)
Xf
χ
= pour
différentes valeurs de Q
Figure 14.2.b. : Allure de la courbe
()
f
ϕ
χ
= pour Q=2
3) Résonance en vitesse
La vitesse complexe de l’oscillateur s’écrit :
i
X
X
ω
=
L’amplitude de la vitesse est donc :
1/ 2
2
20
m0m
0
11QF
VXQ m
ωχ χ
χ
ω
−
⎡⎤
⎛⎞
==−+
⎢⎥
⎜⎟
⎝⎠
⎢⎥
⎣⎦
et son déphasage :
1
arctan
vQ
ϕχ
χ
⎛⎞
⎛⎞
=−
⎜⎟
⎜⎟
⎝⎠
⎝⎠
La vitesse est donc en avance de phase de 2
π
par rapport à l’élongation. En effet :
1
tan 2
tan
vv
ϕ
ϕϕπ
ϕ
−= ⇒=+
(on sait aussi que la dérivée d’une grandeur complexe évoluant sinusoïdalement est en quadrature
avance par rapport à cette grandeur, voir chapitre 10). Le comportement asymptotique de la vitesse
est :
0
1
χ
ωω
⇔ :
0
0
0
0
0
arctan 2
m
v
F
Vm
Q
χ
χ
χ
ω
π
ϕχ
→
→
⎧→
⎪
⎪
⎨⎛⎞
⎪=→
⎜⎟
⎪⎝⎠
⎩
0
1
χ
ωω
⇔ :
()
0
0
0
arctan 2
F
m
Q
χ
χ
χω
π
ϕχ
→∞
→∞
⎧→
⎪
⎪
⎨
⎪
−
→−
⎪
⎩
Etudions maintenant la résonance en vitesse. On voit sur l’expression de l’amplitude de la vitesse
qu’elle est maximale pour 1
χ
= et vaut alors :
0
m,
0
r
QF
Vm
ω
=
Le déphasage correspondant est nul : la vitesse de l’oscillateur est en phase avec la force excitatrice
à la résonance. Les résultats de ce paragraphe sont ont pour équivalent, dans l’analogie
électromécanique, la résonance en intensité dans un circuit R,L,C série. Dans le vocabulaire du
chapitre 13, on peut considérer la réponse en vitesse de l’oscillateur comme un filtrage en vitesse :
seules certaines fréquences de la force permettent d’exciter fortement l’oscillateur. La bande
passante, définie comme la bande de fréquence pour laquelle mm, 2
r
VV≤, a pour extrémités :
φ
2
m0
0
X
m
F
ω
2
1/ 2
0, 35
χ
χ
2
π
−

PCSI CHAPITRE 14 : OSCILLATEURS MECANIQUES FORCES 5/5
mm,2
r
VV=⇒ 2
2
2
1111
1 0
2
11
QQ
Q
χ
χχ
χ
χ
χ
=
⇒−=± ⇒ ±−=
⎛⎞
−+
⎜⎟
⎝⎠
2
0
02
2
11111
1 0
22
11
E
IRQQ
Q
χ
χχ
χ
χ
χ
=⇒ =⇒−=±⇒±−=
⎛⎞
−+
⎜⎟
⎝⎠
On garde les solutions positives :
12
22
11 11
1 ; 1
24 24QQ QQ
χχ
=− + + = + +
d’où 101 202
;
ω
ωχ ω ωχ
==. La largeur 12 2 1
ω
ωω
∆
≡− de la courbe est donc égale à :
0
12
1
Qm
ω
α
ωτ
∆
===
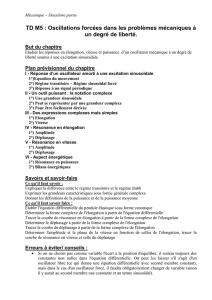
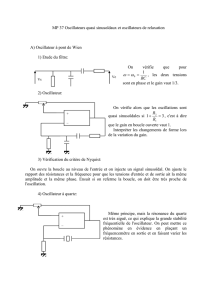
La résonance est donc d’autant plus fine (plus sélective en fréquence) que le facteur de qualité Q du
circuit est élevé (figures 14.3. et 14.4).
Figure 14.3.a. : Variation de l’amplitude de la vitesse
Figure 14.3.b. : Variation du déphasage de la vitesse
Figure 14.4. : Allure de la courbe de résonance en vitesse
pour différentes valeurs du facteur de qualité
m0
0
Vm
QF
ω
Q = 10
Q = 2
Q = 30
0
χ
ωω
=
Q = 0,35
0
ω
χ
ω
=
0
ω
χ
ω
=
ϕ
2
π
m0
0
Vm
QF
ω
1
2
2
π
−
largeur de la
courbe de
résonance
1
/
5
100%