Documents de Physique

Documents de Physique-Chimie – M. MORIN
1
Thème : Lois et modèles
Partie : Temps, mouvement et évolution.
Cours 16 : Cinématique - Mouvement d’un point au cours du temps.
Comment décrire le mouvement d’un solide ?
Afin de décrire le mouvement d’un solide, il faut :
- choisir un système (généralement le solide en mouvement).
- choisir un repère d’espace et de temps (référentiel).
- effectuer le bilan des forces extérieures qui s’exercent sur ce solide (voir le cours sur les lois de Newton)
- définir le vecteur de position, le vecteur vitesse et le vecteur accélération.
- déterminer sa trajectoire.
I. Notion de système.
En cinématique, on s’intéresse au mouvement d’un objet dans un référentiel donné.
Cet objet constitue le système étudié.
Le système peut être indéformable (solide) ou déformable (pâte à modeler).
Dans les études cinématiques suivantes, les systèmes sont assimilés à des points.
On assimilera un solide à un point matériel qui est confondu avec le centre d’inertie du solide et dont la masse est
celle du solide considéré.
Exemples :
Le système est le {ballon} qui peut être assimilé à un Le système est {homme-parachute} qui peut
solide indéformable. être « assimilé » à un solide indéformable.
Le système peut-être également assimilé à un point.
Ce point est le centre d’inertie du ballon.
Le centre d’inertie est le point ayant la trajectoire la plus simple (rectiligne, parabolique).
II. Choix du référentiel d’étude.
Un référentiel est un repère d’espace et de temps.
Référentiel héliocentrique
Référentiel géocentrique
Référentiel terrestre
Origine du repère : Centre du Soleil
Axes du repère : Axes dirigées vers trois
étoiles lointaines considérées fixes.
Applications : Etude des mouvements des
planètes, des comètes…
Origine du repère : Centre de la Terre
Axes du repère : Axes dirigées vers trois
étoiles lointaines considérées fixes.
Applications : Etude des mouvements de la
Lune et des satellites artificiels.
Origine du repère : Origine choisi dans le
laboratoire
Axes du repère : Axes orthonormés.
Applications : Etude des mouvements sur
Terre, au laboratoire.
L’ensemble de ces référentiels sont supposés galiléens.
Un référentiel est dit galiléen si le principe d’inertie est applicable dans celui-ci.

Documents de Physique-Chimie – M. MORIN
2
III. Bilan des forces.
Il est essentiel de faire le bilan des forces afin de déterminer si le mouvement sera uniforme (les forces se
compensent) ou varié (accéléré ou ralenti) (les forces ne se compensent pas).
Cas de la chute d’un parachutiste soumis à 3 forces :
- Le poids
d’expression
Direction : verticale, sens : vers le bas, norme P = mg, point d’application : centre d’inertie G.
- La poussée d’Archimède d’expression
où
est un vecteur unitaire dirigé vers le bas.
Direction : verticale, sens : de bas en haut, norme
=
Vg, point d’application : centre d’inertie du système
immergé.
est la masse volumique du fluide et V le volume du fluide déplacé.
- La force de frottement d’expression (pour les vitesses faibles)
avec
vecteur unitaire vertical
vers le bas. k est le coefficient de frottement.
(direction : celle du mouvement, sens : opposé au mouvement,
norme : f =kv, point d’application : le point de contact entre le support et le système.
Schéma 1 Schéma 2 Schéma 3
Dans quelle(s) situations(s) a-t-on un mouvement rectiligne uniforme ? Un mouvement rectiligne accéléré ?
IV. Description du mouvement d’un point au cours du temps : vecteurs position, vitesse et accélération dans le cas
des mouvements rectilignes.
1. Caractéristiques des mouvements rectilignes.
1.1. La trajectoire.
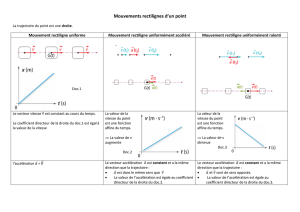
La trajectoire d’un point M animé d’un mouvement rectiligne est une droite.
La position de l’objet est déterminée à chaque instant par son abscisse.
Le vecteur position est :
1.2. Le vecteur vitesse
1.2.1. La vitesse instantanée.
On distingue la vitesse moyenne de la vitesse instantanée.
La vitesse moyenne est calculée sur une longue durée, tandis que la vitesse instantanée est définie
sur un intervalle de temps très court.
v =
quand t2 tend vers t1.
La vitesse instantanée d’un point donne des renseignements plus précis que la vitesse moyenne.

Documents de Physique-Chimie – M. MORIN
3
1.2.2. Le vecteur vitesse d’un objet animé d’un mouvement rectiligne est défini par :
Comme
alors
, nous pouvons écrire que vx =
Caractéristiques du vecteur vitesse d’un point animé d’un mouvement rectiligne.
- Direction : celle de la trajectoire (trajectoire et tangente sont confondues dans ce cas).
- Sens : celui du mouvement (déterminé par le signe de vx)
- Intensité : v = |vx|
On remarque que la vitesse peut être positive ou négative selon l’orientation du vecteur vitesse par rapport à l’orientation de
l’axe (Ox) choisi.
On dit que la vitesse est une grandeur
algébrique.
1.3. Le vecteur accélération .
Le vecteur accélération d’un objet animé d’un mouvement rectiligne est défini par :
Comme alors
Nous pouvons écrire que ax =
Caractéristiques du vecteur accélération d’un point animé d’un mouvement rectiligne.
- Direction : celle de la trajectoire (trajectoire et tangente sont confondues dans ce cas).
- Sens : déterminé par le signe de ax.
- Intensité : a = |ax|

Documents de Physique-Chimie – M. MORIN
4
2. Le mouvement rectiligne uniforme.
2.1. Définition.
Dans un repère donné, un point est animé d’un mouvement rectiligne uniforme si son vecteur vitesse reste constant (ce
qui signifie que le sens, la direction et l’intensité du vecteur vitesse ne varient pas).
2.2. Caractéristiques d’un mouvement rectiligne uniforme.
2.2.1. Le vecteur vitesse .
alors vx = constante.
2.2.2. L’équation horaire d’un mouvement rectiligne uniforme.
Question : Quelle est la fonction du temps x(t) qui, dérivée une fois par rapport au temps t, donne une
constante ?
Réponse : C’est une fonction du premier degré.
L’équation horaire du mouvement rectiligne uniforme est donc :
x = vxt + x0
x0 est une constante qui précise l’abscisse du mobile à l’instant t = 0.
Généralement, on peut écrire x = vxt.
2.2.3. Le vecteur accélération .
Question : Quelle est la valeur de l’accélération ?
Réponse : ax = 0 ou =
(expression du vecteur accélération).
3. Le mouvement rectiligne uniformément varié.
3.1. Définition.
Dans un repère donné, un point est animé d’un mouvement rectiligne uniformément variée si son vecteur accélération
reste constant (ce qui signifie que le sens, la direction et l’intensité du vecteur accélération ne varient pas).
Ce qui peut se traduire également par le fait que la vitesse varie de manière uniforme (sans à coup). Elle augmente ou diminue
régulièrement.
3.2. Caractéristiques d’un mouvement uniformément varié.
3.2.1. Le vecteur accélération .
=
ax =
constante

Documents de Physique-Chimie – M. MORIN
5
3.2.2. Le vecteur vitesse .
Question : Quelle est la fonction du temps v(t) qui, dérivée une fois par rapport au temps t, donne une constante ?
Réponse : C’est une fonction du premier degré.
L’équation horaire du mouvement rectiligne uniforme est donc :
vx (t)= ax t + v0x
v0x est une constante qui précise la vitesse du mobile à l’instant t = 0.
3.2.3. L’équation horaire.
Nous avons deux relations qui permettent de calculer la vitesse vx
vx (t) =
et vx (t) = axt + v0x
Question : Quelle est la fonction du temps v(t) qui, dérivée une fois par rapport au temps t, donne une fonction du
premier degré de t ?
Réponse : C’est une fonction du second degré.
L’équation horaire du mouvement rectiligne uniformément varié est donc :
x0 est une constante qui précise l’abscisse du mobile à l’instant t = 0.
3.3. Mouvement rectiligne uniformément accéléré et ralenti.
Le mouvement est rectiligne uniformément accéléré si les vecteurs accélération et vitesse sont dans le même sens.
M
Le produit scalaire
Le mouvement est rectiligne uniformément ralenti si les vecteurs accélération et vitesse sont dans des sens opposés.
M
Le produit scalaire
Le mouvement sera uniforme si
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%