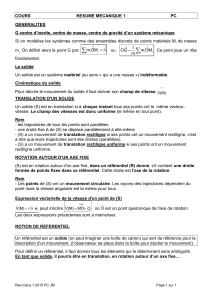
Mouvement:

CINEMATIQUE
EQUATIONS DU MOUVEMENT
SYNTHESE
Soit M, un point du solide (S) en mouvement / R0, décrivant la trajectoire (MS/ R0)
Repère conseillé : Repère cartésien Repère intrinsèque
Equations:
MOUVEMENT DE TRANSLATION RECTILIGNE
Mouvement de Translation Rectiligne Uniformément
Accéléré
x 1/ 2 t² V t X
x v t V
x v
0 0 0
0 0
0
Et une équation indépendante du temps 2 0(Xf-Xi) = Vf²-Vi²
Mouvement de Translation Rectiligne Uniforme
Remplacer 0 par 0
MOUVEMENT DE ROTATION
Mouvement de Rotation Uniformément Accéléré
1/ 2 t² t
t
0 0 0
0 0
0
Et une équation indépendante du temps 2 ’0 (f-i) = f²-i²
Mouvement de Rotation Uniforme
remplacer ’0 par 0
Relation de correspondance entre mouvement de rotation et translation rectiligne
Mouvement:
TRANSLATION ROTATION HELICOIDAL
Trajectoire / R 0 :
RECTILIGNE (CIRCULAIRE CURVILIGNE) CIRCULAIRE HELICE
Position : Sur (0,
x
) si (MS/ R0)(0,
x
) S(t)=x(t),
OM
(t) = x(t) .
x
OM
(t) = r .
n
; r, (t) paramètres de position dans le
repère cylindrique
Vitesse : Le vecteur vitesse est porté par la tangente à la trajectoire, en M, et est orienté dans le sens du mouvement
Champ uniforme : M et P (S)
VM
=
VP
Champs :
MV
=
MO
s/R
;
s / R
=
VM
= v.
x
, Norme
VM
= v =x'(t)
t.r
dt )n.r(d
VM
(mvt de rotation)
Accélération : le vecteur accélération est la dérivée du vecteur vitesse
x.)t(''xx.
dt )V(d
dt )V(d )t(m
m
; car
x
est constant.
n.².rt.'.r
dt )V(d m
m
dans le repère
cylindrique.
S(t) =Arc OM = x(t) ----------------S(t) =Arc AM = r.(t)
S’(t) = v(t) = x’(t)-------------------S’(t) =r.(t)= r.‘(t)
S’’(t) = v’(t) = 0 = x’’(t) ----------S’’(t) =‘(t)= r ‘‘(t)
0 = t + n = t Car n = 0
1
/
1
100%