Devoir Pendule Simple et Couplés - Physique PC

DM2 Informatique Pour Tous / Physique PC 2016 – 2017
Autourdupendule
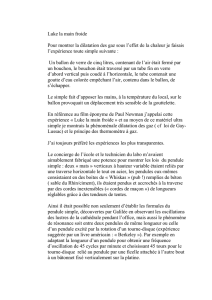
On se propose d’étudier un système physique simple : le pendule. On considère une masse ponctuelle m, repérée
par le point M, suspendu au point Ovia une tige rigide sans masse et de longueur l.
x
y
O
M
~
er
~
eθ
~
T
~
p
θ
l
1 Étude du pendule simple
1.1 Préliminaires
1. Établir l’équation différentielle qui régit le mouvement du pendule.
2. On se place dans le cas de petits mouvements (i.e. θ≪1rad). Simplifier alors l’équation précédente. Quel
nom porte un système physique décrit par une telle équation ?
3. Résoudre l’équation obtenue pour les conditions initiales suivantes : θ(t=0)=θ0et ˙
θ(t=0)=0.
4. Quelle est la période des oscillations ?
1.2 Pendule simples aux grands angles
Dans cette partie, on ne suppose plus que θ≪1rad. L’équation différentielle ne peut donc pas être linéarisée.
On va alors chercher à la résoudre numériquement.
1. Rappeler le principe de la méthode d’Euler pour intégrer une équation différentielle.
2. Comment doit-on choisir le pas de temps ?
3. Proposer une fonction qui prend comme arguments : la longueur du pendule, sa position initiale et sa vitesse
angulaire initiale et qui renvoie θ(t)ainsi que ˙
θ(t).
4. Écrire un script qui affiche les deux courbes y=θ(t)et y=˙
θ(t).
5. Proposer une fonction qui mesure la période Td’un signal périodique de valeur moyenne nulle. On pourra
commencer par chercher les passages à zéros du signal.
6. Donner un algorithme qui trace la période Tdes oscillations en fonction de θ0.
7. Écrire un script qui affiche le portrait de phase de l’oscillateur pour plusieurs conditions initiales.
2 Pendules couplés
2.1 Deux pendules couplés
On considère deux pendules identiques (longueur l, masse m) que l’on repère par les angles θ1et θ2qu’ils font
respectivement avec la verticale. Ces deux pendules sont reliés par un fil de torsion de constante de raideur C.
Ainsi le pendule 1exerce sur le pendule 2un couple de moment Γ=−C(θ2−θ1).
1. Établir le système d’équations couplées qui régit le mouvement des deux pendules.
2. Dans le cas des petits angles, découpler ces deux équations en posant : S=θ1+θ1et D=θ1−θ2.
3. Trouver l’expression de S(t)et D(t), on prendra commme conditions initiales θ1(t=0)=θ0,˙
θ1(t=0)=0,
θ2(t=0)=0,˙
θ2(t=0)=0.
Lycée Victor Hugo – Besançon 1 à rendre le Lundi 9 Janvier

DM2 Informatique Pour Tous / Physique PC 2016 – 2017
4. En déduire l’expression de θ1(t)et θ2(t).
5. On se place désormais dans le cas où les angles sont quelconques. Écrire un algorithme qui résoud le
système d’équations couplées non linéaires qui régit le mouvement des pendules. On écrira une fonction qui
prend quatre arguments : les quatres conditions initiales sur θ1,˙
θ1,θ2,˙
θ2et qui renvoie : θ1(t),˙
θ1(t),θ2(t),
˙
θ2(t). On choisira m=10g, l=10cm et C=6.10−2N.m. L’algorithme pourra commencer par calculer à un
instant tles différents moments de force agissant sur les pendules, puis intégrer les équations du mouvement
pour trouver la position des pendules à l’instant t+dt.
6. Écrire une fonction qui, à partir de θ1(t), ˙
θ1(t), θ2(t), ˙
θ2(t) affiche l’énergie mécanique de chacun des pendules
au cours du temps ainsi que l’énergie mécanique totale du système. Justifier que l’énergie mécanique totale
est constante. Supposons que l’algorithme de résolution donne une énergie mécanique qui diverge, comment
pourrait-on interpréter un tel résultat ?
2.2 Chaîne (presque) infinie de pendules couplés : génération de soliton
On considère une chaîne de Npendules (N≫1) tous identiques et couplés par une même constante de raideur.
On notera θnl’angle que fait le pendule navec la verticale.
1. Établir l’équation différentielle vérifiée par la position du nieme pendule (1 < n < N).
2. On impose les conditions suivantes :
– le dernier pendule de la chaine est maintenu fixe à la position θN−1= 0
– le premier pendule effectue un tour en un temps τ, puis reste fixe :θ0(0) = 0, θ0(τ) = 2πet θ0(t > τ) = 2π.
On crée ainsi une onde progressive non sinusoïdale appelé soliton 1dont on souhaite connaître la vitesse de
propagation. Calculer numériquement la position θn(t) des Npendules au cours du temps.
3. Représenter ce soliton sous la forme d’un diagramme spatio-temporel : on affichera une image en niveau de
gris dont l’intensité du pixels I(n,m) représente la position du pendule nà l’instant m.
4. Écrire une fonction qui mesure la vitesse de propagation du soliton.
2.3 Pour les plus courageux
Il est possible de calculer analytiquement la forme du soliton. Pour cela, on fait l’approximation des milieux continus.
On suppose que la largeur du soliton est grande devant la distance séparant deux pendules. On remplacera donc
θn(t) par une fonction à deux variables : Θ(x,t).
1. En effectuant un développement de Taylor à l’ordre 2 en x, montrer que la fonction Θ vérifie l’équation
suivante (appelée équation de Sine-Gordon 2) :
1. Un soliton est une onde solitaire qui se propage sans se déformer, on les rencontre dans de nombreuses situations physique, on peut
citer par exemple : les tsunamis, les mascaret, les morning glory cloud, ou encore les solitons dans les jonctions Josephson
2. Sine n’est pas le nom d’un scientifique, mais veut dire sinus en anglais...
Lycée Victor Hugo – Besançon 2 à rendre le Lundi 9 Janvier

DM2 Informatique Pour Tous / Physique PC 2016 – 2017
∂2Θ
∂t2−c2
0
∂2Θ
∂x2+ Ω2
0sin(Θ) = 0.
2. Donner l’expression de c0et Ω0
3. On cherche une solution à cette équation sous la forme d’une onde progressive (Θ(x,t) = Θ(x−vt)), et non
sinusoïdale : le soliton. En utilisant le fait que l’on cherche une solution progressive, transformer l’équation
de Sine-Gordon aux dérivées partielles en une équation différentielles avec des dérivées exactes par rapport
àx.
4. Intégrer une première fois cette équation pour aboutir à une équation du type :
1
2∂Θ
∂x 2=Eef f (Θ)
5. On donne l’intégrale suivante : Zdθ
√2 sin(θ/2) =√2 ln (tan θ/2).
Montrer alors qu’il existe deux solutions possibles :
Θ±(x,t) = 4 arctan
exp
±Ω0
qc2
0−v2
(x−x0−vt)
6. Représenter ces deux solutions en fonction de xà un instant tdonné.
Lycée Victor Hugo – Besançon 3 à rendre le Lundi 9 Janvier
1
/
3
100%