Planification de trajectoires robustes 3D pour drones en

Planification de trajectoires robustes 3D pour drones
en
environnement
dynamique
en
environnement
dynamique
T. Youssef, Ch. Inarn, P. Melchior et A. Oustaloup
IMS laboratory
(Université Bordeaux 1 - IPB/Enseirb-Matmeca)
pierre.melc[email protected]
Journées Robotique et Automatique (JRA’12), IRCCyN, Nantes, 23-24 Octobre 2012

Collaboration avec FlyCollaboration avec Fly--NN--SenseSense httphttp://www.fly://www.fly--nn--sense.com/sense.com/
et dans le cadre du Cluster et dans le cadre du Cluster Aquitain Aquitain AETOS AETOS
«« Services et Systèmes de Drones» http://www.aetos-aquitaine.fr/
IntroductionIntroduction : Contexte, Problématique: Contexte, Problématique
2
Problématique du 3D Problématique du 3D SenseSense & & AvoidAvoid

3D Sense & Avoid en environnement dynamique (obstacles fixes ou mobiles)
Résultats précédents
Outil : potentiels artificiels attractifs et répulsifs fractionnaires
Problématique
Contexte Planification de trajectoire pour atteindre une cible mobile
Potentiels artificiels
IntroductionIntroduction : Principales idées: Principales idées
Evitement
d’obstacles
fixes
ou
mobiles
3
Caractérisation par un ordre fractionnaire du danger que présente chaque
obstacle
Détermination de la trajectoire avec prise en compte du danger que présente
chaque obstacle
Environnement dynamique : la méthode a été étendue en considérant des
potentiels attractifs (comme Ge and Cui) prenant en compte la position et la
vitesse de l’UAV, de la cible et des obstacles
Prise en compte des variations paramétriques du robot
Objectif
Extension au cas 3D pour obtenir une planification de trajectoire robuste
pour UAV
Evitement
d’obstacles
fixes
ou
mobiles

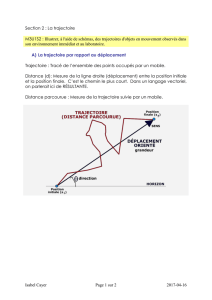
IntroductionIntroduction : Schéma général: Schéma général
4
Commande
Planification de trajectoire
Objectif:
Atteindre
une cible Génération
de la
trajectoire
ψ
z
θ
φ
)(lacet
z
y
x
ref
ref
ref
ref
ψ
Génération
de
mouvement
+_
(
)
t
1
ε
C1(p) G1(p)
(
)
tu
1
correcteur
actionneur
+_
(
)
t
2
ε
C2(p) G2(p)
(
)
tu
2
correteur
actionneur
+_
(
)
t
3
ε
C3(p) G3(p)
(
)
tu
3
correcteur
actionneur
+_
(
)
t
4
ε
C4(p) G4(p)
(
)
tu
4
correcteur
actionneur

Introduction Introduction
Planification de trajectoiresPlanification de trajectoires
Potentiels attractifsPotentiels attractifs
Potentiels répulsifsPotentiels répulsifs
ContexteContexte
ProblématiqueProblématique
0
200
10
15
20
25
30
35
x
r
o
b
(m)
z
rob
(m )
m
rob
=400
m
rob
=110
PlanPlan
Modèle Modèle dynamique d’un Ndynamique d’un N--rotor et linéarisation du modèlerotor et linéarisation du modèle
CommandeCommande
SimulationsSimulations
VidéosVidéos
Conclusion et PerspectivesConclusion et Perspectives
5
Potentiels répulsifsPotentiels répulsifs
Targe
t
200
400 20 40 60 80 100 120 140 160 180
y
rob
(m)
x
r
o
b
(m)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%