2 - Modélisation du Moteur à Courant Continu

Lycée Gustave Eiffel de Dijon
Classe préparatoire P.T.S.I.
Année 2016 - 2017
Électrotechnique
2 - Modélisation du
Moteur à Courant Continu
Table des matières
I Fonctionnement d’un moteur à courant continu 1
1 ForcedeLaplace ...................................... 1
2 Constitution d’un moteur à courant continu . . . . . . . . . . . . . . . . . . . . . . . 2
II Modèle de moteur à courant continu 5
1 Mise en équation des phénomènes physiques . . . . . . . . . . . . . . . . . . . . . . . 5
2 Comportementglobal ................................... 6
3 Identificationdesgrandeurs ................................ 7
III Commande d’un moteur à courant continu 9
IV Aspect énergétique 10
1 Puissance d’entrée ou Puissance "absorbée" . . . . . . . . . . . . . . . . . . . . . . . 10
2 Puissanceélectromagnétique................................ 10
3 Puissance de sortie ou Puissance "utile" . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Pertesetrendement .................................... 11
•Connaître le modèle de connaissance de la machine à courant continu.
•Comprendre le comportement global de la machine à courant continu.
•Savoir identifier les quadrants de fonctionnement de la machine à
Objectif :
Concevoir
Réaliser
Expérimenter
Communiquer
Analyser
Modéliser
Résoudre
Compétences
20 janvier 2017
1

Électrotechnique
Modélisation du
Moteur à Courant Continu
Chaîne d'information
Infos issues d'autres
systèmes et des
interfaces
homme/machine
Informations destinées
aux autres sustèmes et
aux interfaces
homme/machine
Nom
ACQUERIR
Nom
TRAITER
Nom
COMMUNIQUER
Chaîne d'énergie
Energie
d'entrée
Nom Nom Nom Nom
Nom
ACTION
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
Ordres
Grandeurs
physiques
à acquérir
MO
MO
+
VA
Figure 1–Situation dans la chaîne fonctionnelle.
I. Fonctionnement d’un moteur à courant continu
1 Force de Laplace
Soit une portion de fil (petite, définie par un vecteur −→
dl) traversée par un courant électrique I.
Supposons que ce fil soit plongé dans un champ magnétique −→
B.
Alors cette portion de fil est soumise à une petite force −→
dF, appelée force de Laplace telle
que :
−→
dF=I−→
dl∧
−→
B(1)
Propriété 1 : Force de Laplace
dl
dl
dF
dF
Figure 2–Représentation des forces de Laplace.
Lycée Gustave Eiffel de Dijon 1 / 12 Classe préparatoire P.T.S.I.
Année 2016 - 2017

Électrotechnique
Modélisation du
Moteur à Courant Continu
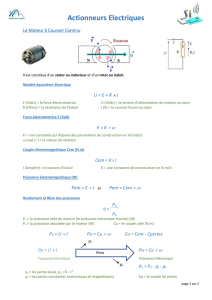
Calculons les force de Laplace, engendrée dans chaque partie de fil (1) et (2) (les autres parties sont
jugées négligeables). En déduire le couple autour du point O.
B
xy
z
U
i
i
L
Fil (1)
Fil (2)
D
O
•Fil 1 :
~
F1=ZL
0
−→
dF=ZL
0
I−→
dl∧
−→
B
=IZL
0
dl−→
y∧(−B−→
x)
=IB ZL
0
−→
z dl =IBL−→
z
•Fil 2 :
~
F2=ZL
0
−→
dF=ZL
0
I−→
dl∧~
B
=−IZL
0
dl−→
y∧(−B−→
x)
=−IB ZL
0
−→
z dl =−IBL−→
z
•Moment en O:
−−→
MO= 2 Zfil
−→
dF∧
−−→
OP =Zfil I−→
dl∧
−→
B∧y−→
y+D
2
−→
x
=I ZL
0
(+−→
z)∧(y−→
y+D
2
−→
x)Bdl +ZL
0
(−−→
z)∧(y−→
y−D
2
−→
x)Bdl!
=IB ZL
0
(+−→
z)∧(y−→
y+D
2
−→
x)dl +ZL
0
(−−→
z)∧(y−→
y−D
2
−→
x)dl!
=IB ZL
0
D
2
−→
y dl +ZL
0
D
2
−→
y dl!
= 2IBL D
2
−→
y
Exemple 1 :
Le principe d’un moteur est donc de placer une (ou plusieurs) boucle(s) de fil traversée par un courant
électrique (on parle de bobinage), sur une pièce en rotation (appelée rotor), le tout placé dans un champ
magnétique. Cela a pour effet de créer un couple qui fera tourner ce rotor.
2 Constitution d’un moteur à courant continu
Le moteur à courant continu est principalement constitué de 2ensembles :
•Le stator : partie fixe du moteur ;
•Le rotor : partie tournante du moteur.
a) Le stator
Lycée Gustave Eiffel de Dijon 2 / 12 Classe préparatoire P.T.S.I.
Année 2016 - 2017

Électrotechnique
Modélisation du
Moteur à Courant Continu
(a) (b) (c)
(d) (e)
Figure 3–Différentes étapes de rotation d’un moteur à courant continu.
Le stator (ou « inducteur ») est la partie fixe du moteur (stator ∼
=statique). Il a pour fonction
de créer un champ magnétique reçu par les bobines du rotor. Il peut être constitué d’aimants
permanents ou de bobines alimentées par un courant.
Définition 1 : Stator
(a) Photo d’un stator seul (b) Schéma d’un stator à 2 paires
de pôles.
Figure 4–Stator.
b) Le rotor
Lycée Gustave Eiffel de Dijon 3 / 12 Classe préparatoire P.T.S.I.
Année 2016 - 2017

Électrotechnique
Modélisation du
Moteur à Courant Continu
Le rotor (ou « induit ») est la partie tournante du moteur (rotor ∼
=rotation). Il est constitué
d’un enroulement de spires conductrices réunies en faisceaux, disposés de telle manière que
lorsqu’un côté est soumis au pôle nord, l’autre est au pôle sud : les faisceaux sont tous reliés en
série grâce aux lames du collecteur.
Définition 2 : Rotor
Figure 5–Photos d’un rotor.
Chaque faisceau est constitué d’un enroulement d’un grand nombre de spires. Les faisceaux sont disposés
afin que deux côtés opposés d’une spire soient soumis aux deux pôles de l’aimant. L’intensité de la force
électromagnétique d’entraînement dépend du nombre de spires.
Comme le courant électrique provient généralement d’une source extérieure fixe, pour ne pas emmêler les fils
lors de la rotation, les bobines du rotor sont alimentées par des contacts électriques frottants, via des balais ou
des charbons fixé sur le stator. L’élément du rotor qui est en contact avec ces balais s’appelle le collecteur
(fig.6).
Figure 6–Collecteur.
c) Les paires de pôles
Pour améliorer la puissance, le couple généré et la fluidité du moteur, la bobine du rotor peut être doublée,
triplée, etc... Chacune des ces bobines supplémentaire est soumise d’un coté à un pôle nord, de l’autre à un pôle
sud. On parle alors de paire de pôles 1.
1. Cette définition sera essentielle pour l’étude des moteurs triphasés l’an prochain.
Lycée Gustave Eiffel de Dijon 4 / 12 Classe préparatoire P.T.S.I.
Année 2016 - 2017
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%