Bruit en electronique et detection synchrone

Dept GEII IUT Bordeaux I
BRUIT EN ELECTRONIQUE
et
DETECTION SYNCHRONE
(Vol. 7)
G. Couturier
Tel : 05 56 84 57 58
email : [email protected]

Sommaire
BRUIT EN ELECTRONIQUE
I- Fonction de corrélation et densité spectrale
II- Sources de bruit en électronique
III- Association de sources de bruit
IV- Caractéristiques de bruit d'un amplificateur
IV- 1- Bande passante équivalente de bruit
IV- 2- Facteur de bruit d'un amplificateur
IV- 3- Facteur de bruit des transistors et des amplificateurs opérationnels
V- Minimisation du bruit par adaptation d'impédance
VI- Facteur de bruit d'une chaîne de quadripôles
DETECTION SYNCHRONE
I- Intérêt de la détection synchrone et principe de fonctionnement
II- La détection synchrone en pratique
II- 1- Effet du temps d'intégration limité
II- 2- Effet de l'amplification

II- 3- Réalisation d'un détecteur synchrone
III- Applications de la détection synchrone
III- 1- Démodulation d'amplitude
III- 2- Démodulateur I/Q
III- 3- Recherche de non-linéarités
III- 4- Mesure en photoconductivité, photoluminescence

Le bruit est inhérent à tout montage électronique, dans nombre de montages cependant
on peut l'ignorer, mais dès qu'il s'agit d'amplifier des signaux bas niveaux, q.q. µV par exemple,
il y a un certain nombre de précautions à prendre.
Dans ce chapitre on commence donc par décrire rapidement les outils mathématiques
adaptés pour traiter le bruit en électronique, on introduit ainsi les fonctions de corrélation et
les densités spectrales. On fait ensuite un rapide tour d'horizon des différentes sources de bruit
en électronique en donnant leurs densités spectrales respectives. On s'intéresse naturellement à
la valeur efficace de bruit en sortie d'un amplificateur, on introduit ainsi la bande passante
équivalente de bruit et le facteur de bruit. On examine le cas des transistors et des
amplificateurs opérationnels. Pour terminer on calcule le bruit dans une chaîne de quadripôles
en cascade.
En électronique on utilise fréquemment le mot bruit pour qualifier tous les signaux
aléatoires indésirables.
Le bruit est-il un signal ?, porte t-il une information ? difficile de répondre à cette
question, impossible même. Prenons le cas d'un voyageur qui attend le métro sur le quai de la
gare, le bruit du train au loin est un signal qui prévient le voyageur de l'arrivée imminente du
train, ce signal est utile. Quand le voyageur est dans le train, il aimerait bien que le bruit du
train cesse .....
I- Fonction de corrélation et densité spectrale
Dans le cas des signaux déterministes on dispose des fonctions mathématiques
classiques (cos(ωt), exp(-t/τ), etc. ...) pour décrire les signaux dans le domaine temporel et des
transformées de Fourier pour l'espace des fréquences. Dans le cas où l'on ne peut pas disposer
d'une écriture mathématique pour décrire un signal il n'est pas possible d'en calculer sa
transformée de Fourier et donc de savoir comment il se répartit dans le domaine des
fréquences. De nombreux signaux ne sont pas déterministes, ce sont même les plus nombreux,
on les appelle signaux aléatoires. Pour les décrire il nous faut trouver de nouveaux outils, ce
sont précisément les fonctions de corrélation et les densités spectrales.
Prenons par exemple le cas du signal x(t) ci-dessous, ce signal passe aux instants t1, t2,
... tm-1, tm, tm+1 ... par la même valeur A. Question : existe t-il une relation entre les valeurs
de x(t) prises aux instants t1+∆t, t2+∆t, ... , tm-1+∆t, tm+∆t, tm+1+∆t, ... ?
A
t t t t t
12m-1 mm+1
t t t t t
12m-1 mm+1
+∆t+∆t+ + +∆ ∆ ∆
t t t x(t)
Fig. 1 Les valeurs de f(t) aux instants t1+∆t, t2+∆t, ... tm-1+∆t, tm+∆t, tm+1+∆t sont-elles quelconques ?

Il n'est pas toujours évident de dire si les valeurs aux instants t1+∆t, t2+∆t, ... , tm-1+∆t,
tm+∆t, tm+1+∆t,... sont complètement indépendantes les unes des autres. Des corrélations
peuvent existées, il peut même y avoir dans certains cas une périodicité cachée. Un moyen de
répondre à cette question est d'introduire la fonction de corrélation Cxx(τ) du signal x(t), elle
est définie comme suit :
C)=lim 1
T
x(t)x(t )dt
xx T0
T
(τ τ
→∞−
∫(1)
Dans le cas où le signal x(t) est à valeur moyenne nulle, ce qui est vrai pour tous les
bruits en électronique, la fonction de corrélation Cxx(τ) sera nulle partout sauf en τ=0 si il
n'existe aucune relation entre les valeurs de x(t) aux instants t1+∆t, t2+∆t, ... , tm-1+∆t, tm+∆t,
tm+1+∆t,... et ceci quelque soit ∆t=τ (∆t≠0). Pour τ=0, il est clair que la fonction de corrélation
est différente de zéro, en effet on a :
C)=lim 1
T
x(t)x(t)dt lim 1
T
x(t)dt
xx T0
T
T2
0
T
(0→∞→∞∫ ∫
=(2)
La quantité Cxx(0) représente la valeur quadratique moyenne du signal. D'après la
relation (1), la fonction de corrélation Cxx(τ) est une fonction paire de la variable τ, en effet :
C)=lim 1
T
x(t)x(t )dt =lim 1
T
x(t +)x(t)dt =C
xx T0
T
T-
T-
xx
( ( )τ τ τ τ
τ
τ
→∞→∞
− −
∫ ∫
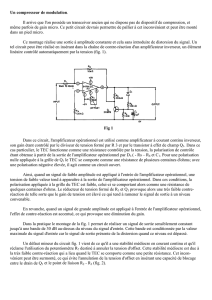
Un signal aléatoire dont la fonction de corrélation Cxx(τ) est nulle partout sauf en τ=0
où elle vaut Cxx(0), est appelé bruit blanc. En général les sources de bruit présentent des
fonctions de corrélation avec l'allure suivante :
Cxx(0)
Cxx(τ)
τ
τ−τ mm
Fig. 2 Exemple d'allure de fonction de corrélation
Le fait par exemple que Cxx(τ) est différent de zéro pour τ petit signifie qu'il existe des
corrélations entre les valeurs de x(t) prises aux instants t1+∆t, t2+∆t, ... , tm-1+∆t, tm+∆t,
tm+1+∆t,... . Au fur et à mesure que ∆t=τ devient grand, les corrélations disparaissent et la
fontion de corrélation devient nulle.
Dans le cas des signaux périodiques, x(t+T)=x(t), on peut encore définir une fonction
de corrélation :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
1
/
35
100%