Eléments de biomécanique appliqués à la marche

1
1
ELEMENTS DE PHYSIQUE
ELEMENTS DE PHYSIQUE
APPLIQUES A LA
APPLIQUES A LA
BIOMECANIQUE
BIOMECANIQUE
OBJECTIFS
COMPREHENSION DES PARAMETRES
D ’ANALYSE DU MOUVEMENT
CHOIX DES EXAMENS
CRITIQUE DES METHODOLOGIES
ELEMENTS DE PHYSIQUE
ELEMENTS DE PHYSIQUE
APPLIQUES A LA
APPLIQUES A LA
BIOMECANIQUE
BIOMECANIQUE
MECANIQUE DU POINT MATERIEL
DEFINITION
RAPPEL DE MATHEMATIQUES
CINEMATIQUE
CINETIQUE
MECANIQUE DU SOLIDE
THEOREME DU CENTRE DE GRAVITE
THEOREME DU MOMENT CINETIQUE
MECANIQUE DU POINT MATERIEL
MECANIQUE DU POINT MATERIEL
Définition
–Tout objet dont les dimensions sont petites par rapport aux
distances inter-objet considérées
Grain de sable sur une table
Terre dans le système solaire
Moyens d ’étude:
Cinématique: Etude des mouvements (Espace/temps)
Cinétique ou dynamique: Etude des forces impliquées dans le
mouvement
•Espace/Temps/Masse
EXEMPLES D ’UTILISATION DE LA NOTION DE POINT MATERIEL:
CENTRE DE GRAVITE - CENTRE DES PRESSIONS
RAPPELS DE MATHEMATIQUES
RAPPELS DE MATHEMATIQUES
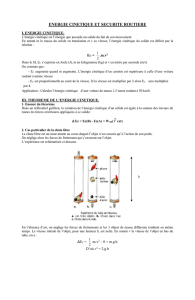
DERIVEE
–fonction y = f(x)
si x s ’accroît de d(x),
y s ’accroît de d(y)
–y + dy = f(x + dx)
–dy = f(x + dx) - f(x)
–y ’ = dy/dx est la dérivée et la pente de
la droite AB
–si dx tends vers 0, dy/dx tends vers la
pente de la tangente à la courbe au
point A
–En chaque point de la courbe y=f(x)
on définit la valeur de la dérivée.
L ’ensemble des valeurs constitue la
fonction dérivée f ’(x)= df(x)/dx ou
df/dx
Y
X
xx + dx
y
y + dy
A
B
RAPPELS DE MATHEMATIQUE
RAPPELS DE MATHEMATIQUE
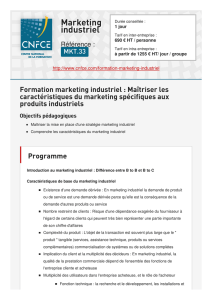
PRIMITIVE
–Fonction inverse de la fonction dérivée
– f ’(x) = df/dx soit f(x) = P[f ’(x)]
–df(x) = f ’(x).dx
–Soit la courbe f ’(x) fonction de x,
df(x) = ABCD
–si x varie de x1 à x2, f(x2) - f(x1)= Σ
rectangles ABCD = Sf ’(x).dx qui est
l ’aire comprise sous la courbe
–si x1 est fixe et dx tends vers 0, on obtient
la fonction primitive f(x) = Sf ’(x).dx
–Si F(x) est la primitive de f(x), toute
fonction F(x) + Ct est également la
primitive de f(x)
f ’(x)
x
x1 x2
dx
A
B C
D
RAPPELS DE MATHEMATIQUE
RAPPELS DE MATHEMATIQUE
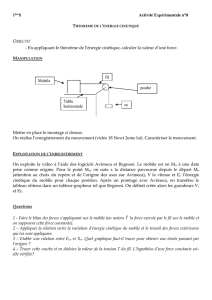
VECTEURS
– Définition: AB est un segment de
droite AB orienté dont A est
l ’origine
A
B
Addition: AR = AB + AC
A
R
B
C
Multiplication par un Scalaire:
AR = m.AB
A
B
R
Produit Vectoriel: OP= OA ϖ OB
OP = OA.OB.Sinα
O
P
A
B

2
2
CINEMATIQUE
CINEMATIQUE
Définitions
–Trajectoire d ’un mobile:
ensemble des positions en
fonction du temps
–Vitesse d ’un mobile:
vecteur porté par la tangente
à la trajectoire
–Accélération d ’un mobile:
dérivée du vecteur vitesse
par rapport au temps
MoM = s(t)
v = ds/dt
γ = dv(t)/dt = d_s/dt
Mo
M
v
CINEMATIQUE
CINEMATIQUE
Mouvement rectiligne
–La trajectoire est une droite
–v(t) et γ (t) sont portés par la droite
–Si γ = 0, le mouvement est uniforme
λv = v0 = Ct et s= v0.t
–Si γ = Ct, le mouvement est
λ uniformément accéléré
λv = γ.t + v0 et s = 1/2 γt_ + v0.t + s0
γ= Ct
γ= 0
t
s
CINEMATIQUE
CINEMATIQUE
Mouvement circulaire uniforme
–La trajectoire est une circonférence
–La vitesse est constante
–l ’aacélération est centripète
λγ= ω_R = v_/R
O
M
M ’
V(t)
V(t+dt) γ
CINETIQUE OU DYNAMIQUE
CINETIQUE OU DYNAMIQUE
Principe fondamental
–Dans un système galliléen
–Si un corps est animé d ’un mouvement rectiligne uniforme
–Toute modification du mouvement a une cause appelée force
–Le principe fondamental de la dynamique indique qu ’il y a
proportionnalité entre force et accélération, ce facteur étant la
masse: F = m. γ
Applications
–Poids d ’un corps: P = m.g
–Statique: v = 0, γ = 0 donc F = 0
MECANIQUE DU SOLIDE
MECANIQUE DU SOLIDE
Centre de gravité
–soit un ensemble de points Ai de masse mi
–On appèle centre de gravité le point G tel que:
λΣ miGAi = 0
Théorème du centre de gravité:
– Le mouvement du centre de gravité est celui d ’un
point qui aurait pour masse la masse totale du système
et auquel serait appliquée la somme de toutes les
forces extérieures du système
MECANIQUE DU SOLIDE
MECANIQUE DU SOLIDE
Moment cinétique:
–Soit un point M de masse m mobile autour
d ’un axe Δ
–On appèle moment cinétique de M par rapport
à l ’axe Δ le vecteur MtΔ= Σ HMi Δ mi vi
= Σ mi ri_ ω = J. ω
–J = Σ mi ri_ est appelé moment d ’inertie
Théorème du moment cinétique:
–Le moment de toutes les forces extérieures
appliquées à un solide est égal à la dérivée de
son moment cinétique
Δ
M
v
Hr
1
/
2
100%