étude cinématique des fluides topographie de

PSI Brizeux Ch. DF2 : Étude cinématique des fluides 14
CHAPITRE DF2
CHAPITRE DF2
ÉTUDE CINÉMATIQUE DES FLUIDES
TOPOGRAPHIE DE QUELQUES ÉCOULEMENTS
Nous avons vu dans le chapitre précédent que la description du mouvement d’un fluide pouvait être
« lagrangienne » ou « eulérienne ». A priori le point de vue eulérien, privilégiant la notion de champ
d’une grandeur au point M à la date t sera systématiquement utilisé. Dans la deuxième partie de ce
chapitre nous verrons notamment comment les propriétés du champ des vitesses
!
r
v
(M, t) nous donnent
des renseignements sur la nature de l’écoulement lui-même. Le point de vue lagrangien ne peut cependant
être totalement abandonné. Nous allons voir à présent comment le retrouver dans la notion de dérivation
particulaire :
1. DERIVATION PARTICULAIRE
1.1 Dérivation locale
Partons de l’exemple d’un champ scalaire eulérien tel que le champ de pression P(M, t) ou de masse
volumique ρ(M, t). On peut d’abord envisager sa variation dans le temps en restant fixé sur le point M
de l’espace : il s’agit là d’un point de vue eulérien : les valeurs de ρ(M, t + dt) et ρ(M, t) ne
concerneront pas la même particule de fluide. On parle alors de variation locale de la grandeur. Du
point de vue mathématique on écrit alors :
dρ(M, t) =
!
"#(M,t)
"t
dt ou
!
d"
dt
=
!
"#(M,t)
"t
La variation de la masse volumique en un même point M est due uniquement due ici à la
variable temporelle.
1.2 Dérivation particulaire
On peut revenir à une conception lagrangienne en remarquant que la valeur de la masse volumique
au point M à la date t est aussi celle de la particule qui s’y trouve.
On peut alors s’intéresser à la variation de cette masse volumique quand on suit la particule. Pendant
le temps dt, celle-ci se déplace du point M (x, y, z) au point M’ (x + dx, y + dy, z + dz) avec dx = vx dt,
dy = vy dt, dz = vz dt où vx , vy , vz représentent les composantes du vecteur
!
r
v
(M, t) qui est bien aussi la
vitesse de la particule en M.
Déterminer la variation correspondante de la masse volumique, c’est calculer la différence :
ρ(x + dx, y + dy, z + dz, t + dt ) – ρ(x, y, z, t)

PSI Brizeux Ch. DF2 : Étude cinématique des fluides 15
D’un point de vue mathématique, on écrira alors :
dρ =
!
"#
"x
dx +
!
"#
"y
dy +
!
"#
"z
dz +
!
"#
"t
dt
La variation de la masse volumique, calculée à partir du champ eulérien, mais en suivant la
particule, c’est-à-dire du point de vue lagrangien, est due ici à la fois à la variable temporelle et
aux variables de déplacement .
En remplaçant dx , dy, dz alors eux-mêmes reliés à dt, il vient :
dρ =
!
"#
"x
vx dt +
!
"#
"y
vy dt +
!
"#
"z
vz dt +
!
"#
"t
dt
!
d"
dt
=
!
"#
"x
vx +
!
"#
"y
vy +
!
"#
"z
vz +
!
"#
"t
On voit bien la différence d’écriture avec la variation locale de ρ. Pour souligner cette différence et
insister sur le fait que ce n’est pas le même «
!
d"
dt
» dans les deux cas, on note parfois
!
D"
Dt
la quantité :
!
D"
Dt
=
!
"#
"x
vx +
!
"#
"y
vy +
!
"#
"z
vz +
!
"#
"t
appelée alors variation particulaire de la masse volumique.
Retenons que la signification de la dérivation particulaire est foncièrement attachée à l’idée
d’une variation temporelle d’une grandeur associée à une particule en mouvement mais a priori
décrite sous la forme d’un champ spatio-temporel.
.
On peut enfin remarquer que l’écriture précédente se simplifie à l’aide de l’opérateur gradient et
qu’on peut écrire :
!
D"
Dt
=
!
r
v
.
!
grad
ρ +
!
"#
"t
Rappelons que le deuxième terme est associé à une variation locale qui n’existe par définition qu'en
régime variable. Le premier terme quant à lui indique une variation convective indiquant que ρ a aussi
varié parce qu’on s’est déplacé.
Cette formule se généralise à tout champ scalaire g(M, t) associé au fluide :
!
D g
Dt
=
!
r
v .grad
g +
!
"g
"t
Cette dérivée particulaire se décompose en :
!
r
v .grad
g dérivée convective et
!
"g
"t
dérivée locale

PSI Brizeux Ch. DF2 : Étude cinématique des fluides 16
1.3 Accélération particulaire
Parmi les grandeurs attachées à une particule de fluide se trouve la vitesse elle-même. Suivre la
variation de cette vitesse quand on se déplace avec la particule, c’est tout simplement considérer son
accélération.
Celle-ci peut donc être directement calculée à partir du champ eulérien des vitesses grâce à la notion
de dérivation particulaire précédemment introduite. La difficulté provient du caractère vectoriel de la
vitesse, difficulté qu’on peut lever en considérant ses trois composantes scalaires en coordonnées
cartésiennes par exemple. Pour chacune de celles-ci, on écrira :
ax =
!
Dvx
Dt
=
!
r
v
.
!
grad
vx +
!
"vx
"t
ay =
!
Dvy
Dt
=
!
r
v
.
!
grad
vy +
!
"vy
"t
az =
!
Dvz
Dt
=
!
r
v
.
!
grad
vz +
!
"vz
"t
Pour garder une relation vectorielle donnant l’accélération
!
r
a
en fonction de la vitesse
!
r
v
, nous
introduisons l’opérateur
!
r
v
.
!
grad
dont l’expression symbolique, en coordonnées cartésiennes est :
(
!
r
v
.
!
grad
) = vx
!
"
"x
+ vy
!
"
"y
+ vz
!
"
"z
de sorte qu’on peut l’appliquer à un vecteur
!
r
A
selon la définition :
(
!
r
v
.
!
grad
)
!
r
A
= (vx
!
"Ax
"x
+ vy
!
"Ax
"y
+ vz
!
"Ax
"z
)
!
r
e
x
+ (vx
!
"Ay
"x
+ vy
!
"Ay
"y
+ vz
!
"Ay
"z
)
!
r
e
y
+ (vx
!
"Az
"x
+ vy
!
"Az
"y
+vz
!
"Az
"z
)
!
r
e
z
Nous retiendrons finalement l’expression de l’accélération particulaire :
L’accélération d’une particule de fluide s’obtient à partir du
champ eulérien des vitesses du fluide en écrivant :
!
r
a
=
!
Dr
v
Dt
=
!
(r
v .grad)r
v
+
!
"r
v
"t
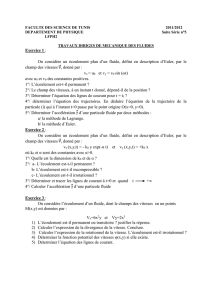
Pour bien illustrer le terme convectif de l’accélération , prenons l’exemple d’un rapide de rivière :
A
B

PSI Brizeux Ch. DF2 : Étude cinématique des fluides 17
Nous nous plaçons en régime stationnaire, où la vitesse du fluide en chaque point de la rivière garde
une valeur constante au cours du temps :
!
r
v
(M). Les lignes de courant s’identifient alors aux trajectoires
des particules. Nous savons, pour l’instant « intuitivement », que la vitesse en B est supérieure à la
vitesse en A, le lit de la rivière ayant une section plus faible au niveau du point B. Une particule de
fluide suivie de A en B, voit sa vitesse augmenter : elle a nécessairement accéléré, alors que le champ
des vitesses du fluide ne dépend pas du temps. En régime stationnaire l’accélération est purement
convective, c’est à dire liée au mouvement ou convection du fluide.
On vu que pour un écoulement permanent, l’accélération locale est nulle. Dans quel cas
l’accélération convective est-elle elle-même nulle ? C’est évident pour un écoulement uniforme. Mais,
plus généralement le terme convectif sera nul chaque fois que, dans l’écoulement, toute particule de
fluide se déplace sur une trajectoire formée de points où la vitesse ne varie pas spatialement. De tels
écoulements sont dits laminaires.
Un écoulement laminaire est donc caractérisé par un champ de vitesses tel que
!
(r
v .grad)r
v
=
!
r
0
Citons l’exemple déjà rencontré du champ :
!
r
v
= v(y)
!
r
e
x
pour lequel, l’accélération est identiquement
nulle, puisque ce champ est aussi permanent….
2 CARACTERISTIQUES DU CHAMP DES VITESSES D'UN FLUIDE
2.1 Flux et divergence – incompressibilité
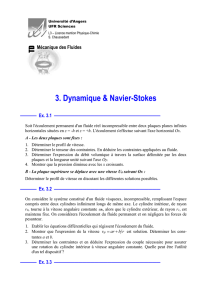
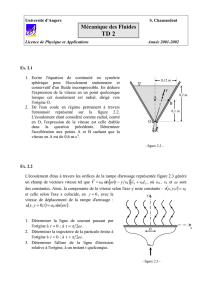
Isolons au sein d’un fluide en écoulement une masse M de fluide contenue à l’instant t dans un volume
T. Cette même masse M, du fait de son déplacement, occupe à l’instant t + dt, le volume T’ :
T
T’
Celui-ci est engendré à partir du volume initial par le déplacement des parois. Un élément de paroi dS
engendre dans son déplacement le volume élémentaire dτ =
!
r
v
.
!
r
n
dS dt.

PSI Brizeux Ch. DF2 : Étude cinématique des fluides 18
Globalement la variation dT du volume occupé par M s’écrit donc :
dT =
!
S
""
!
r
v
.
!
r
n
dS dt soit
!
dT
dt
=
!
S
""
!
r
v
.
!
r
n
dS
Le flux du champ des vitesses à travers la surface fermée limitant un volume T associé à une masse
donnée de fluide est donc directement lié à la variation de ce volume.
Nous avons déjà vu la correspondance entre le flux intégral et la divergence locale : le même
raisonnement nous conduit à affirmer que la variation du volume élémentaire dτ d’une particule donnée de
fluide de masse invariable dm est liée à la divergence des vitesses au point où se trouve la particule à
l’instant t selon la formule :
!
d("#)
dt
= div
!
r
v
Or, cette variation, si elle est non nulle, implique que la masse a été comprimée ou dilatée. Donc en un
point où est non nulle, on peut affirmer que la particule qui s’y trouve verra une variation de masse
volumique Or,
!
D"
Dt
représente aussi la variation de masse volumique quand nous suivons la particule de
fluide dans son déplacement. D’après la formule de dérivation particulaire cette variation s’écrit :
!
D"
Dt
=
!
r
v
.
!
grad
ρ +
!
"#
"t
=
!
r
v
.
!
grad
ρ - div(ρ
!
r
v
) = - ρ div
!
r
v
Cette dernière expression, trouvée en utilisant l’équation de conservation de la masse, nous permet bien
de retrouver le rôle de div
!
r
v
dans la variation de la masse volumique de la particule.
Nous définirons alors deux types d’écoulements :
- Les écoulements incompressibles pour lesquels div
!
r
v
est identiquement nulle en tout
point de l’écoulement .
- Les écoulements compressibles pour lesquels cette identité n’est pas respectée.
2.2 Circulation et rotationnel : tourbillons
2.2.1 Position du problème
Intéressons nous à présent à la circulation du champ des vitesses le long d’une courbe fermée C, c’est à
dire à une intégrale du type :
!
C
"
!
r
v
.
!
dr
r
C
v
dr
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%