M1 - Cinématique cartésienne

Mécanique 1 Cinématique du point en
coordonnées cartésiennes
Lycée Polyvalent de Montbéliard - Physique-Chimie - TSI 1 - 2016-2017
Contenu du programme officiel :
Notions et contenus Capacités exigibles
Espace et temps classiques.
Référentiel d’observation.
Caractère relatif du mouvement.
Description d’un mouvement. Vecteur-position,
vecteur-vitesse, vecteur-accélération.
-Réaliser et exploiter quantitativement un enregistrement vidéo
d’un mouvement : évolution temporelle des vecteurs vitesse et
accélération.
Systèmes de coordonnées cartésiennes. - Utiliser les expressions des composantes du vecteur-position, du vecteur-
vitesse et du vecteur-accélération dans le cas des coordonnées cartésiennes.
Mouvement rectiligne à accélération constante. - Exprimer la vitesse et la position en fonction du temps.
Mouvement courbe de vecteur-accélération constant. - Prévoir qualitativement les mouvements projetés sur des axes parallèle
et perpendiculaire au vecteur accélération.
En gras les points devant faire l’objet d’une approche expérimentale.
Table des matières
1 La cinématique 1
1.1 Notion de référentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Description du mouvement d’un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 La cinématique du point en coordonnées cartésiennes 3
2.1 Description ............................................... 3
2.2 Définition des vecteurs cinématiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Mouvement rectiligne uniformément accéléré . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.4 Mouvement courbe uniformément accéléré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
La cinématique est la science de l’étude du mouvement en soi. On ne s’intéresse pas aux causes qui
ont donné naissance au mouvement. Il est indispensable de savoir décrire les mouvements avant de pouvoir
étudier leurs causes.
1 La cinématique
1.1 Notion de référentiel
Pour décrire un mouvement, il est nécessaire de définir correctement les distances et les temps. En
mécanique classique, ces deux notions sont absolues et définies grâce aux unités des mètres et des secondes.
Pour que la cadre de la mécanique classique reste valable, on supposera toujours que la vitesse vdes corps
en mouvement est très faible devant la célérité de la lumière dans le vide c. Dans ce cadre, pour décrire un
mouvement, il faut avant tout définir un référentiel dans lequel l’étudier.
Définition. Un référentiel est un point de vue nécessaire à la description d’un mouvement. Il contient
un repère permettant de décrire l’espace ;
une horloge permettant de mesurer le temps.
Un mouvement est toujours relatif, la description d’un mouvement dépend du référentiel.
En conséquence, la première chose à faire en abordant un problème de mécanique est de définir le
référentiel d’étude. Sans cette définition, on ne sait pas de quoi on parle.
Maxime Champion - www.mchampion.fr 1/8

Mécanique 1 : Cinématique du point en coordonnées cartésiennes Maxime Champion
Application 1 : Décrire le mouvement du casque d’un cycliste et de la valve d’une de ses roues
dans le référentiel du sol (c’est-à-dire ce que voit quelqu’un à l’arrêt) et dans le référentiel lié au
cycliste (c’est-à-dire ce que voit le cycliste).
1.2 Description du mouvement d’un point
On se place dans un référentiel d’étude. On note Ole centre du repère et M(t)la position d’un point
mobile au temps t.
Définition. Le mouvement du point M(t)est défini par trois vecteurs cinématiques
le vecteur position −−→
OM(t);
le vecteur vitesse #”
v(t) = d−−→
OM
dt(t);
le vecteur accélération #”
a(t) = d2−−→
OM
dt2(t).
Une trajectoire est l’ensemble des positions successives du point Mau cours du temps.
•
O
•t=tfinal
•
t= 0
−−→
OM(0) •
−−→
OM(t)
#”
v(t)
#”
a(t)
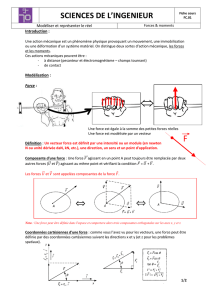
Fig. 1 – Un exemple de trajectoire avec le vecteur position, le vecteur vitesse et le vecteur accélération.
Propriété. Le vecteur vitesse est tangent à la trajectoire.
Cette propriété est due à la définition du vecteur dérivée.
IMesure des vecteurs cinématique à l’aide d’un film
Les vecteurs #”
v(t)et #”
a(t)sont des vecteurs instantanés, ils sont définis au temps tquel que soit le
temps.
Lors d’un film, on a une image tous les ∆tsecondes. Ainsi, les positions obtenues sont discrètes, une
image est obtenue pour tous les temps tiet il n’est plus possible d’obtenir les vecteurs instantanés. On
définit alors, pour tous les ti,
le vecteur position −−→
OM(ti);
le vecteur vitesse moyen par une dérivée discrète
#”
v(ti) = #”
vi=
−−→
OM(ti+1)−−−→
OM(ti)
∆t;
le vecteur accélération moyen par une dérivée discrète
#”
a(ti) = #”
ai=
#”
v(ti+1)−#”
v(ti)
∆t.
Les vecteurs vitesses et accélérations sont définis par une moyenne entre deux points. On ne sait pas ce
qui se passe entre deux points de mesures. On espère que l’intervalle de temps ∆test choisi suffisamment
petit pour ne pas perdre des phases intéressantes du mouvement.
Autrement dit, on a −−→
OM(ti+1) = −−→
OM(ti) + #”
v(ti)∆t
et
#”
v(ti+1) = #”
v(ti) + #”
a(ti)∆t .
2/8

Mécanique 1 : Cinématique du point en coordonnées cartésiennes Maxime Champion
×
ti−1
×ti
×
ti+1
×ti+2
#”
v(ti−1)
#”
v(ti)
#”
v(ti+1)
#”
a(ti)
#”
a(ti−1)
•
#”
vi
#”
vi+1
#”
ai=
#”
vi+1 −#”
vi
∆t
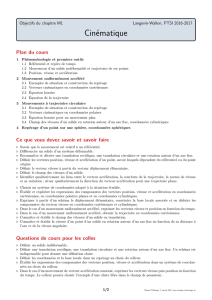
Fig. 2 – Les vecteurs vitesses et accélérations définis à l’aide d’un ensemble de positions discrètes. Sur la droite,
le détail du calcul du vecteur accélération #”
a(ti).
Expérience 1 : TP 11 - Mesure de l’accélération de pesanteur
2 La cinématique du point en coordonnées cartésiennes
2.1 Description
Définition. Les coordonnées cartésiennes sont définies dans un repère orthonormé direct (#”
ex,#”
ey,#”
ez). Le
vecteur position est alors défini par
−−→
OM =x#”
ex+y#”
ey+z#”
ez.(2.1)
z
x
y
#”
ez
#”
ex
#”
ey
M
H
y
x
z
O
Fig. 3 – Les coordonnées cartésiennes : −−→
OM =x#”
ex+y#”
ey+z#”
ez.
Un repère est dit orthonormé si les vecteurs de base sont de norme un, soit ||#”
ex|| =||#”
ey|| =||#”
ez|| = 1,
et s’ils sont tous orthogonaux entre eux, soit #”
ex⊥#”
ey⊥#”
ez⊥#”
ex.
Un repère est dit direct si #”
ex∧#”
ey=#”
ez. Il s’agit d’un produit vectoriel. La direction du troisième
vecteur est donné avec la règle de la main droite, sur cette main (et uniquement sur cette main !), le pouce
représente le premier vecteur, l’index représente le second vecteur et le majeur représente la direction du
troisième vecteur.
Pour manipuler les coordonnées cartésiennes, on pourra utiliser l’animation [1].
3/8

Mécanique 1 : Cinématique du point en coordonnées cartésiennes Maxime Champion
2.2 Définition des vecteurs cinématiques
Le point Mest mobile, ses coordonnées dépendent donc du temps. Par définition, il faut dériver le
vecteur position pour obtenir les vecteurs vitesse et accélération.
Définition. En mécanique, les dérivées par rapport au temps se notent avec un point sur la fonction,
autrement dit dx(t)
dt= ˙x(t).
LLLAttention ! Cette expression désigne la dérivée par rapport au temps tde la fonction dépendant
du temps t7→ x(t). Il ne faut pas confondre la fonction x(t)et la variable mathématique inconnue x.
Propriété. Le point Mest mobile, on définit donc
le vecteur position dépendant du temps
−−→
OM(t) = x(t)#”
ex+y(t)#”
ey+z(t)#”
ez;(2.2)
en dérivant le vecteur position, comme les vecteurs de base sont constant, on obtient le vecteur vitesse
dépendant du temps
#”
v(t) = ˙x(t)#”
ex+ ˙y(t)#”
ey+ ˙z(t)#”
ez;(2.3)
de même en dérivant le vecteur vitesse, on obtient le vecteur accélération
#”
a(t) = ¨x(t)#”
ex+ ¨y(t)#”
ey+ ¨z(t)#”
ez.(2.4)
2.3 Mouvement rectiligne uniformément accéléré
Tout le raisonnement de ce paragraphe est à savoir refaire, il ne faut surtout pas l’apprendre par coeur.
IPosition du problème et choix du repère
Considérons un point matériel défini par une vitesse initiale #”
v(0) et par une accélération constante
colinéaire au vecteur vitesse initial dans le référentiel lié au sol.
Remarque : Nous étudions un problème de cinématique. Ainsi, on ne se préoccupe par de
savoir d’où provient cette accélération et cette vitesse. Toutefois, remarquons que ce problème
peut décrire par exemple le mouvement d’une voiture lorsque l’on maintient l’accélération.
Au points de départ, le référentiel est défini mais pas le système de coordonnées. On peut donc le choisir
pour simplifier les calculs. On se place donc en coordonnées cartésiennes de sorte que
−−→
OM(0) = #”
0et #”
v(0) = v0
#”
exet #”
a(t) = a0
#”
ex.(2.5)
L’accélération est bien constante et colinéaire à la vitesse initiale.
ILes équations du mouvements
Le vecteur accélération est défini fixe dans l’énoncé, mais par ailleurs, la description des vecteurs ciné-
matiques donne une expression dépendant des dérivées des coordonnées. Ces deux définitions sont égales,
l’une est imposée par l’extérieur tandis que l’autre dépend de la définition des coordonnées cartésiennes.
Ainsi on a
#”
a(t) = a0
#”
ex= ¨x(t)#”
ex+ ¨y(t)#”
ey+ ¨z(t)#”
ez.(2.6)
Cette équation peut aussi être vue sous forme de vecteur colonne, c’est-à-dire que l’on a de façon
équivalente
#”
a(t) =
a0
0
0
=
¨x(t)
¨y(t)
¨z(t)
.(2.7)
4/8

Mécanique 1 : Cinématique du point en coordonnées cartésiennes Maxime Champion
Par identification des coordonnées, on trouve les équation du mouvement
¨x(t) = a0; ¨y(t) = 0 ; ¨z(t)=0 .(2.8)
Si cette identification n’est pas claire, on peut utiliser le produit scalaire sur l’équation (2.18). En
réalisation le produit scalaire avec #”
ex, il vient a0
#”
ex·#”
ex= ¨x(t)#”
ex·#”
ex+ ¨y(t)#”
ey·#”
ex+ ¨z(t)#”
ez·#”
ex. Comme
le repère est orthonormé, #”
ex·#”
ex=||#”
ex|| = 1 et #”
ex·#”
ey=#”
ex·#”
ez= 0, d’où la première équation du
mouvement.
Application 2 : À l’aide du produit scalaire, retrouvez les deux secondes équations du mouvement
IObtention du vecteur vitesse
On doit intégrer une fois les équations du mouvements (2.8) pour obtenir la vitesse. On obtient
˙x(t) = a0t+v0,x ; ˙y(t) = v0,y ; ˙z(t) = v0,z .(2.9)
Les termes v0,x,v0,y et v0,z sont des constantes d’intégrations qu’il ne faut surtout pas oublier. On a donc
#”
v(t)=(a0t+v0,x)#”
ex+v0,y
#”
ey+v0,z
#”
ez.(2.10)
Ces valeurs doivent être ensuite comparés à la condition initiale sur la vitesse (2.5). Il vient
#”
v(t= 0) = v0,x
#”
ex+v0,y
#”
ey+v0,z
#”
ez=v0
#”
ex.(2.11)
On en déduit que les constantes d’intégrations valent v0,x =v0et v0,y =v0,z = 0.
Ainsi, la vitesse vaut
#”
v(t)=(a0t+v0)#”
ex=
a0t+v0
0
0
.(2.12)
IObtention du vecteur position
On doit intégrer cette fois la vitesse (2.24) pour obtenir la position. On obtient
x(t) = 1
2a0t2+v0t+x0;y(t) = y0;z(t) = z0.(2.13)
Les termes x0,y0et z0sont des constantes d’intégrations qu’il ne faut surtout pas oublier. On a donc
−−→
OM(t) = 1
2a0t2+v0t+x0#”
ex+y0
#”
ey+z0
#”
ez.(2.14)
Ces valeurs doivent être ensuite comparés à la condition initiale sur la position (2.5). Il vient
−−→
OM(t= 0) = x0
#”
ex+y0
#”
ey+z0
#”
ez=#”
0.(2.15)
On en déduit que les constantes d’intégrations valent x0=y0=z0= 0.
Ainsi, le vecteur position vaut
#”
v(t) = 1
2a0t2+v0t#”
ex=
1
2a0t2+v0t
0
0
.(2.16)
Application 3 : Une voiture initialement à vitesse nulle accélère uniformément à 1 m/s2, au bout
de combien de temps a-t-elle parcourue 10 m et 100 m ? Pour ces deux points, quelle est alors sa
vitesse ?
5/8
 6
7
8
6
7
8
1
/
8
100%