Modélisation d'un ressort : Schémas de discrétisation & Amortissement

4 juillet 2012 François Bourassa
Centre ESCER Stagiaire
MODÉLISATION D’UN RESSORT
Schémas de premier ordre et schéma saute-mouton, sans et avec amortissement
But : Modéliser le mouvement d’une masse suspendue à un ressort, avec ou sans
amortissement, à l’aide de deux schémas de discrétisation différents. Étudier le
mouvement dans le temps, l’amortissement critique et l’erreur introduite par les
schémas.
Paramètres du problème :
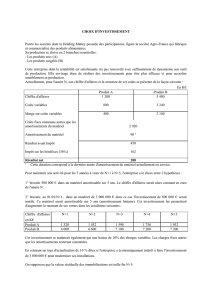
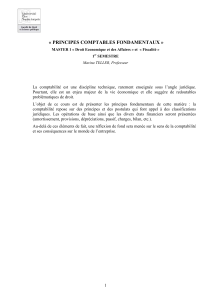
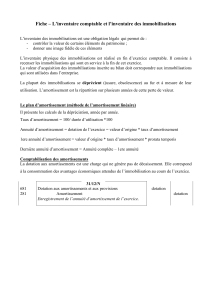
Figure 1 : Schéma de la masse suspendue au ressort sans amortissement, avec les
graphiques de la position X et de la vitesse v en fonction du temps

2
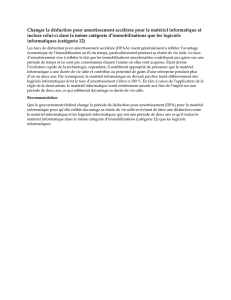
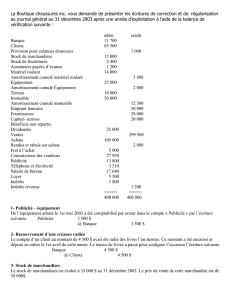
Figure 2 : Schéma de la masse suspendue au ressort avec amortissement, avec le
graphique de la position X en fonction du temps
t=Temps, en secondes
T = Période, i.e. durée d’un cycle, en s (temps pour que la masse retrouve sa
position initiale sans amortissement)
X = Position, en m
Xéq = Position d’équilibre du ressort
Xo = Position du ressort au temps 0
v = Vitesse, en m/s
K = Constante de rappel du ressort, en N/m
m = Masse suspendue, en kg
a = Accélération, en m/s2
c =Coefficient d’amortissement, en s-1
=1/c, en s
Ce problème possède une solution analytique, soit une relation exacte entre la
position ou la vitesse de la masse et le temps. Sans amortissement, cette solution

3
est de la forme
tXtX
cos
0
et
tvtv
sin)( 0
, avec
m
K
. Avec
amortissement, pour une petite valeur de c seulement, elle est de la forme
teXtX tc
cos
0
, et
tevtv tc
sin)( 0
, avec la même règle pour
. Cependant,
pour obtenir ces solutions, il faut des connaissances en calcul différentiel. Sans cela,
il est nécessaire de modéliser la situation pour pouvoir étudier le mouvement du
ressort.
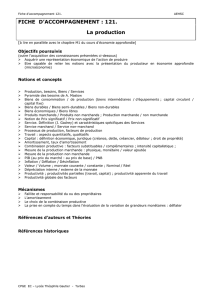
De plus, il faut tenter de déterminer le coefficient d’amortissement critique. À titre
indicatif, la résolution analytique du problème permet de trouver que la valeur critique
de c est de
2
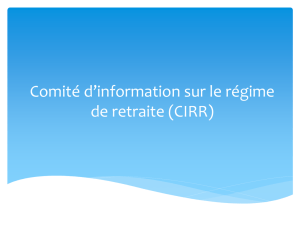
Il s’agit du coefficient pour lequel la masse retrouvera sa position
initiale dès le premier cycle, sans autre oscillation. Comme le montre la figure
suivante, il s’agit d’un cas intermédiaire entre un très grand c et un très petit c :
Figure 3 : Mouvement de la masse pour différents coefficients d’amortissement
Modélisation du problème – sans amortissement : D’abord, il faut utiliser les
équations de la cinématique:
atvtv
vtXtX
0
0
Ensuite, à partir de la seconde loi de Newton et de l’équation de la force de rappel du
ressort, on obtient :
maKX
maF
mKXa/
Ces trois équations décrivent respectivement la position, la vitesse et l’accélération
de la masse en fonction du temps. Il est à noter que la vitesse se trouve à être la
dérivée de la position, et l’accélération, la dérivée de la vitesse. Puis, pour pouvoir
résoudre ces équations, il faut les modifier sous la forme d’équations discrètes,
exprimées en fonction de « pas de temps ». Pour ce faire, il existe plusieurs
schémas différents. Les deux plus simples sont le schéma de premier ordre ainsi que
le schéma saute-mouton (leapfrog en anglais), qui est de deuxième ordre.

4
Schéma de premier ordre :
m
KX
a
tavv
tvXX
n
n
nnn
nnn
11
11
où
Nn 0
et
Tt
Il s’agit d’un schéma dont la précision est passable, comme il sera montré plus loin.
Ce type de schéma utilise les données « présentes » pour calculer la valeur des
variables au pas de temps suivant.
Schéma de second ordre :
m
KX
a
tavv
tvXX
n
n
nnn
nnn
2
2
11
11
où
Nn 0
et
Tt
.
Il s’agit d’un schéma beaucoup plus précis qu’un schéma de premier ordre, pour une
valeur de ∆t raisonnable. Cette précision accrue s’explique par le fait qu’un schéma
de premier ordre tient uniquement compte des valeurs au début du pas de temps,
donc la pente (
t
X
ou
t
v
) calculée pour ce pas de temps ne suit pas tout à fait la
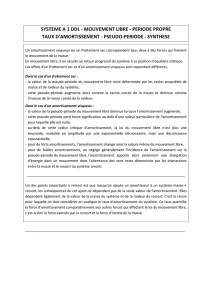
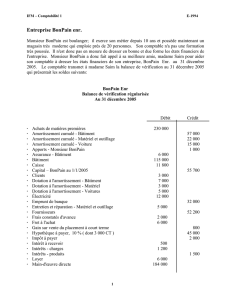
courbe réelle. Un schéma de deuxième ordre réduit beaucoup cette erreur, parce
qu’il utilise, pour chaque deux pas de temps, la pente au centre (après le premier pas
de temps), bien plus près de la variation réelle de la courbe. Une représentation
graphique aide à comprendre cela (courbe réelle en bleu):
Schéma de premier ordre
Schéma de second ordre
Cette méthode est plus précise, cependant elle a ses limites. Surtout, elle comporte
une valeur critique pour le pas de temps, au-dessus de laquelle le modèle devient
instable et incohérent. On cherchera cette valeur pour différents paramètres initiaux
grâce à plusieurs essais du modèle.

5
Modélisation du problème – avec amortissement : On utilise encore les équations
de la cinématique pour la vitesse et la position. Par contre, l’équation de
l’accélération change pour inclure l’amortissement :
)(
)(
cvamKX
entamortissemamF
acv
m
KX
Il est à noter que l’accélération dépend à la fois de la vitesse et de la position. On
remarque aussi que le ressort sans amortissement a un coefficient c de 0. Il faut
maintenant transformer toutes ces équations en des équations discrètes. Pour un
schéma de premier ordre, on obtient :
n
n
n
nnn
nnn
cv
m
KX
a
tavv
tvXX
11
11
Pour un schéma de second ordre, on obtient :
1
11
11
n
n
n
nnn
nnn
cv
m
KX
a
tavv
tvXX
On observe ici que c’est
1n
v
qui est utilisé pour le calcul de l’accélération.
L’utilisation de
n
v
rend le schéma instable.
Implémentation sur ordinateur : Le logiciel Microsoft Excel est pratique pour
effectuer les calculs d’un problème aussi simple. Les étapes à suivre pour mettre en
place la simulation sont très similaires pour les cas avec et sans amortissement.
Voici donc un protocole pour chaque schéma, avec les spécificités relatives à
l’amortissement (en bleu):
Schéma de premier ordre :
1. Définir les conditions expérimentales, donc m et K (et c).
a. m=1, K=1 est un cas simple pour débuter
b. Avec amortissement : c=1
2. Définir le pas de temps
a. Pour une précision satisfaisante, il faut un pas de temps d’un ordre au
moins cent fois plus petit que T.
b. Grâce aux relations
m
K
et
w
T
2
, on peut calculer T selon les
conditions initiales sélectionnées et estimer l’ordre de grandeur de
t
.
c. Pour m=1 et K=1,
t
sera de l’ordre des centièmes de seconde.
3. Définir les conditions initiales. Créer une première ligne de tableau pour les
variables t, x et v au temps 0. Les valeurs initiales choisies ici sont
respectivement de 0, 1 et 0.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%