Le cours №4 Les systèmes de navigation des coordonnées

Le cours №4
Les systèmes de navigation des
coordonnées
En fonction des échelles du déplacement de
l'objet on trouve les systèmes des coordonnées
suivants:
1) les systèmes des coordonnées locaux; 2) les
systèmes des coordonnées globaux; 3) les systèmes
des coordonnées astronomiques (les spatiaux).
Selon la forme les systèmes des coordonnées se
divisent sur:
1) rectangulaire (Cartésien); 2) sphériques; 3)
cylindriques.
Nous prendrons par exemple le système
horizontal sphérique des coordonnées (SC) (de la
catégorie local SC).
S C Locaux utilisés pour la navigation de
l'objet sur des dizaines, centaines de km, quand on
peut négliger la courbure de la Terre.
S C Globaux sont d'habitude liés à la Terre et
sont utilisés pour la navigation sur toute la surface de
la terre et l'espace circumterrestre.

S C Astronomiques sont utilisés les définitions
des coordonnées des corps célestes, engins spatiaux
par rapport à la Terre, le Soleil, les Galaxies.
Fig. 4.1
1. Le système des coordonnées
géographique
Se rapporte aux catégories S C globaux
(sphériques). La position de l'objet est définie par
trois coordonnées : la longitude
λ
, la latitude
, et la
hauteur
h
.
p.
M
– le centre de masse de l'objet;
p.
M
– la projection du p.
M
Sur le géoïde
Terrestre (le point d'intersection de la verticale
véritable avec le géoïde).

Fig. 4.2
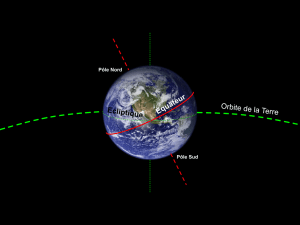
La forme de la Terre – le géoïde (dans les
systèmes géodésiques), plus souvent l'ellipsoïde.
La latitude
– angle entre la verticale véritable
et l'équateur.
On accepte pour la forme de la Terre le géoïde,
mais dans les systèmes géodésiques les plus précis,
on utilise souvent l'ellipsoïde.
2. Le système des coordonnées
géocentrique

Il est semblable au système des coordonnées
géographique (fig. 4.2) et se distingue par le moyen
de calcule de latitude. Ici au lieu de la latitude
géographique on utilise la latitude géocentrique
et
au lieu de la hauteur
h
on utilise la longueur le rayon-
vecteur
r
, c à d la distance du centre de la Terre.
La forme de la Terre ici ne joue pas un grand
rôle on peut l’accepter sous forme de la sphère.
Le S C géocentrique est plus facile pour les
calcules, mais modeler à bord de l'objet on peut
seulement dans le SC géographique, car c’est les
accéléromètres qui définie la direction de la verticale
géographique.
3. Le système rectangulaire des
coordonnées géocentrique
Les coordonnées du p.
M
: l'abscisse
ξ
,
l'ordonnée
η
, cote (hauteur)
ζ
.
L'axe –
O
selon l'axe de rotation de la Terre;
O
,
O
– Dans le plan de l'équateur;
O
– Dans le plan du méridien De Greenwich.
On utilise ce SC pour les calcules
intermédiaires, la forme de la Terre ne joue pas un
rôle.

Fig. 4.3
4. Le système des coordonnées inertiels
Le système inertiel des coordonnées s'appelle
n'importe quel système des coordonnées, dont les
axes sont immobiles dans l'espace inertiel, mais le
début des coordonnées avance régulièrement et tout
droit par rapport aux étoiles fixes.
On choisit le début des coordonnées dans le
point le plus confortable pour la navigation.
 6
7
8
9
6
7
8
9
1
/
9
100%





![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)