Synthèse de la mécanique vue en sup - PCSI

PCSI Les Ulis Cours REVISIONS PCSI
Synthèse la mécanique vue en sup - Page 1 -
Synthèse de la mécanique vue en sup
(A maîtriser parfaitement, c’est le minimum vital requis)
Objectifs :
• Restructurer les connaissances de première année en mécanique,
• Dégager les différentes approches de résolution d’un problème,
• Etre apte à résoudre tout exercice de cinématique ou statique
Recommandations :
Ce document ne peut se substituer au cours de première année. Par sa concision, il met
simplement en évidence les points clefs qu’il s’agira d’aller rechercher et travailler dans votre
cours de première année, si vous en sentez le besoin.
I Modélisation mécanique d’un système .............................................................................. 2
II La cinématique ................................................................................................................... 6
II.1 Les relations cinématiques ......................................................................................... 6
II.2 Les relations de fermeture .......................................................................................... 7
II.3 Les mouvements plans, la cinématique graphique ..................................................... 8
III La statique .................................................................................................................... 10
III.1 Notion d’isolement ................................................................................................... 10
III.2 La modélisation des actions mécaniques (AMs) ...................................................... 10
III.2.1 Modélisation locale-globale des AMs .............................................................. 10
III.2.2 Modèle de coulomb .......................................................................................... 10
III.2.3 Torseur des actions mécaniques : cas des liaisons parfaites ............................ 11
III.3 Principe fondamental de la statique ......................................................................... 11
III.4 Principe des actions réciproques .............................................................................. 11
III.5 Méthodologie de résolution d’un problème de statique (conseils) .......................... 12
III.6 Les problèmes statiquement plans, la statique graphique ........................................ 13
III.6.1 Système soumis à l’action de 2 glisseurs (forces) ............................................ 13
III.6.2 Système soumis à l’action de 3 glisseurs (forces) ............................................ 13
III.6.2.a Les forces ne sont pas parallèles .............................................................. 14
III.6.2.b Deux forces sont parallèles ...................................................................... 14
III.6.2.c Bilan ......................................................................................................... 15
IV Rappels sur les torseurs ................................................................................................ 16
IV.1 Définition d’un torseur ............................................................................................. 16
IV.2 Opération sur les torseurs ......................................................................................... 16
IV.2.1 Addition ............................................................................................................ 16
IV.2.2 Multiplication par un scalaire ........................................................................... 16
IV.2.3 Comoment de deux torseurs ............................................................................. 17
IV.2.4 Automoment d’un torseur ................................................................................ 17
IV.3 Axe central d’un torseur ........................................................................................... 17
IV.4 Torseurs particuliers ................................................................................................. 17
IV.4.1 Torseur couple .................................................................................................. 17
IV.4.2 Torseur glisseur ................................................................................................ 17
IV.4.3 Décomposition d’un torseur ............................................................................. 18
V Tableau des liaisons normalisées ..................................................................................... 19

PCSI Les Ulis Cours REVISIONS PCSI
Synthèse la mécanique vue en sup - Page 2 -
I MODELISATION MECANIQUE D’UN SYSTEME
Système(s) de référence
Afin d’étudier le mouvement d’un système de solides, il est nécessaire de mettre en place un
(ou des) système(s) de référence (encore appelé « référentiel(s) »). Il représente en quelque
sorte la position d’observation des phénomènes. Il est composé d’une description de l’espace
et d’une description du temps (associée au choix d’une origine des temps).
La description de l’espace est réalisée par la mise en place de repères.
Un repère
(
)
0
R O,x,y,z
r r r
est composé de:
• une base généralement orthonormée directe :
(
)
, ,
x y z
r ur r
• un point origine : O
Dans nos applications, la description des temps est unique pour un problème
donné (même origine quelque soit le référentiel). Ainsi, un changement de
système de référence sera associé à un changement de repère
Solide : (= solide indéformable en prépa)
En classes préparatoires, les systèmes sont composés de solides réputés
indéformables.
Un solide S est dit indéformable si quelque soit le couple de points (A,B)
appartenant à S, la distance AB reste constante au cours du temps.
(
)
(
)
, , distance AB =constante
A B S∀ ∈
Paramétrage d’un solide :
A chaque solide S, on peut associer un repère (R
2
) qui lui est attaché tel que
tout point de S soit fixe dans R
2
au cours du temps.
Paramétrer la position de S par rapport à R
1
revient à paramétrer la
position du repère R
2
(lié à S) par rapport au repère R
1
.
Pour cela, il faut définir 6 paramètres indépendants :
• 3 paramètres de position : vecteur
1 2
OO
uuuuur
(3 paramètres
dimensionnels)
• 3 paramètres d’orientation de la base liée à R
2
par rapport à la base liée à R
1
. (3
paramètres angulaires)
+A
+B
Solide S
Solide S
y1
x1
z1
o1
o2
y2
x2
z2y1
x1
z1

PCSI Les Ulis Cours REVISIONS PCSI
Synthèse la mécanique vue en sup - Page 3 -
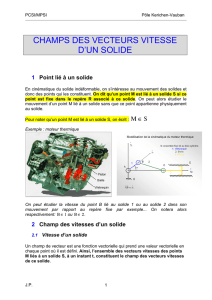
Les angles d’Euler représentent une possibilité (à connaître)
pour définir l’orientation d’un solide dans l’espace à l’aide
de 3 paramètres angulaires.
Les 3 rotations s’effectuent autour de 3 vecteurs
indépendants. Le choix des vecteurs de rotation effectué dans
Euler est le suivant :
• La première rotation s’effectue autour de
1
z
ur
• la dernière rotation s’effectue autour de
2
z
uur
.
• La rotation intermédiaire s’effectue autour d’un vecteur
perpendiculaire à
1
z
ur
et à
2
z
uur
.
1 2
1 2
z z
n
z z
∧
=∧
ur uur
r
ur uur
ψ
angle de précession ;
θ
angle de nutation ;
ϕ
angle de
rotation propre
Vecteur taux de rotation de R
2
/R
1
:
2 1
/ 1 2
R R
z n z
φ θ ϕ
Ω = + +
uuuuuur ur r uur
& &
&
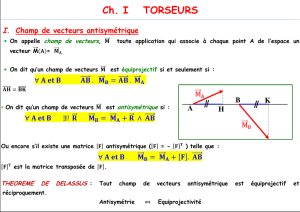
Graphe de structure :
Un graphe de structure ou graphe des
liaisons est une vue épurée du système
• Les solides (ou ensemble de solides
cinématiquement équivalent) sont
représentés dans des ellipses.
• Les arcs représentent les liaisons
entre solides.
• Les efforts extérieurs au système
peuvent être ajoutés en vue d’une
étude de statique.
La caractérisation géométrique des liaisons entre solides est primordiale. Dans le cadre du
paramétrage des mouvements relatifs entre solides, donc du paramétrage des différents
repères, les éléments géométriques de référence associés aux liaisons permettent de mettre en
place les paramètres juste nécessaires au passage d’un solide à un autre.
Exemple : liaison pivot
Elément géométrique de référence : l’axe )x(O,
En disposant les repères associés aux deux solides avec une direction
x
commune, un seul paramètre angulaire est nécessaire pour effectuer le
changement de base (de repère).
x1
n
y1
v
z1
ψ
v
j
z1
z2
nθ
n
x2
j
y2
z2
ϕ
x1y1z1
n v z1
n j z2
x2y2z2
ψ
θ
ϕ
Solide 1
Solide2
Solide 3
Solide 4
Pivot )x(O,

PCSI Les Ulis Cours REVISIONS PCSI
Synthèse la mécanique vue en sup - Page 4 -
Schéma cinématique et paramétrage :
Le schéma cinématique donne une représentation plus descriptive et complète du
fonctionnement du mécanisme. Cette représentation peut être spatiale ou plane, elle doit
respecter les caractéristiques géométriques du mécanisme (parallélisme, orthogonalité,
coaxialité...) (cf exemple page suivante).
Dans ce schéma :
• les liaisons entre les pièces sont représentées par les symboles normalisés (plans ou
spatiaux) des liaisons. Leurs orientation et position sont respectées.
• les pièces (classes d'équivalence) sont représentées par un trait ;
•
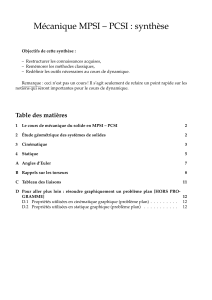
Exemple : borne réglable
1 3
46
L1/3
L3/4
L4/6
L1/6 L1/4
L
1/3
: Pivot glissant d’axe (
y
,
A
r
)
L
1/4
: Glissière de direction (
x
r
)
L
3/4
: Appui plan de normale (
n
r
)
L
4/6
: Hélicoïdale (
x
,
A
r
)
L
1/6
: Appui plan de normale (
x
r
)
3 14 6
A
x
y
Paramétrage
• Faire apparaître sur le schéma cinématique les caractéristiques géométriques des
liaisons (exemple : 1 liaison pivot impose un axe (direction + position d’un point de
l’axe)
• Mettre en place les paramètres cinématiques associées aux liaisons. Remarque, dans le
cas d’une étude plane ne faire intervenir que les paramètres plans.
• Indiquer juste le paramétrage strictement nécessaire à l’étude envisagée.

PCSI Les Ulis Cours REVISIONS PCSI
Synthèse la mécanique vue en sup - Page 5 -
Les changements de base :
Les figures de changement de base sont fondamentales. Elles doivent être utilisées
obligatoirement pour réaliser les calculs. Ainsi, évite-on toute discussion sur le signe des
angles et donc des erreurs dans les résultats finaux.
Quelques conseils :
• Les figures de changement de base ont toujours la même forme,
quel que soit l’angle réel entre les deux bases, qu’il soit positif ou
négatif.
• L’orientation des bases est directe et il est fortement recommandé
de travailler avec un vecteur hors plan pointant vers l’extérieur de
la feuille.
• L’angle représentée est de l’ordre de 20° afin d’avoir une lecture
immédiate des produits scalaire et vectoriels.
• Lorsque plusieurs rotations s’effectuent autour d’un vecteur commun (exemple,
liaisons pivot d’axes parallèles), les figures de changement de bases sont superposées.
x1
x2
y1
y2
z =
1z2
θ
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%