MODÉLISATION TEMPORELLE DES SYSTÈMES LINÉAIRES

MODÉLISATION TEMPORELLE
DES SYSTÈMES LINÉAIRES
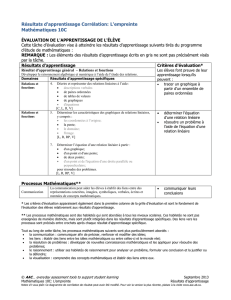
1 Mise en équation des systèmes linéaires
1.1 systèmes du premier ordre
exemple électrique:
équation de la maille:
u1(t) = uR(t) + uC(t)
i(t) = C duCuR(t) = RC duC
dt dt
u1(t) = RC duC + uC(t)
dt
u°
C(t) + 1 uC(t) = u1(t)
RC RC
exemple mécanique:
équation de la dynamique:
mγ = Σ F = FE - f.v
m dv(t) = FE - fv(t)
dt
v°(t) + f v(t) = FE(t)
m m
équation du modèle:
˙
s (t) + 1
τ s(t) = bo e(t)
où τ représente la constante de temps
1.2 systèmes du second ordre
exemple électrique:
équation de la maille:
u1(t) = uL(t) + uR(t) + uC(t)
i(t) = C duCuR(t) = RC duC
dt dt
uL(t) = L di(t) = LC d2uC
dt dt2
u1(t) = LC d2uC + RC duC + uC(t)
dt2dt
u°°
C(t) + R u°
C(t) + uC(t) = u1(t)
LLC LC
exemple mécanique:
équation de la dynamique:
mγ = Σ F = FE - fv - k(x-x0)
posons X = (x-x0)
m d2X(t) = FE - f dX(t) - k X(t)
dt2dt
X°°(t) + f X°(t) + k X(t) = FE(t)
m m m
Académie de Martinique Préparation Agrégation Sciences Physiques B. Pontalier
Modélisation temporelle des Systèmes Linéaires page 1 /10
u1
uC
R
C
m
f
x
k
FE
m
f
x
FE
u1
uC
R
C
L

équation du modèle: s°°(t) + 2z ω0 s°(t) + ω0
2
s(t) = b0 e(t)
où ω0 représente la pulsation propre non amortie et z le coefficient d’amortissement
2 Résolution de l’équation différentielle
De manière générale on recherche 2 types de solutions:
- la solution générale de l’équation sans second membre
- des solutions particulières caractéristiques du second membre
La solution complète est la somme de la solution générale de l’équation sans second membre et des
solutions particulières.
2.1 solution générale de l’équation sans second membre: régime libre
c’est la solution de l’équation différentielle lorsque le second membre est nul, c’est à dire lorsque le
système n’est soumis à aucune sollicitation; le système évoluera librement suivant une dynamique qui lui
est propre et qui constituera sa signature, à condition qu’à l’instant initial d’observation on l’ait écarté
de sa position d’équilibre: on dira qu’on a fourni au système des conditions initiales non nulles.
2.1.1 système du premier ordre
˙
s (t) + 1
τ s(t) = 0
la solution générale de cette équation est: sg(t) = k e-t/τ
où k est une constante d’intégration qui ne peut être déterminée qu’à la lumière des conditions initiales;
si sg(0+) représente l’état initial du système, alors k = s(0+)
2.2.2 système du second ordre
s°°(t) + 2z ω0 s°(t) + ω0
2
s(t) = 0
suivant la valeur de l’amortissement z, la solution de cette équation est:
z > 1 sg(t) = A e-[(z + √ z2 - 1) ω0 t] + B e-[(z - √ z2 - 1) ω0 t]
sg(t) = A e-t/τ1 + B e-t/τ2
le système équivaut à 2 systèmes du premier ordre mis en cascade; la réponse est monotone
décroissante
z = 1 sg(t) = (A+B t) e-(z ω0 t)
le système équivaut à 2 systèmes identiques du premier ordre mis en cascade; la réponse est
monotone décroissante
z < 1 sg(t) = e-(z ωo t) [ A e-j ωa t + B e+j ωa t ]
où ωa = ωo √ 1 - z2 représente la pulsation propre amortie
à partir des formules d’Euler, on obtient:
sg(t) = e-(z ωo t) [a cos ωa t + b sin ωa t]
les coefficients a et b dépendent des conditions initiales s(0+) et s°(0+)
cette réponse est oscillante amortie de pseudo-période Ta = 2" / ωa
Académie de Martinique Préparation Agrégation Sciences Physiques B. Pontalier
Modélisation temporelle des Systèmes Linéaires page 2 /10

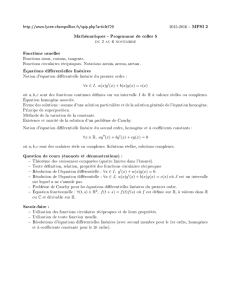
2.2.3 observation des régimes oscillants dans le plan de phase
on appelle espace des phases un espace construit à partir d’une variable s(t) et de ses dérivées successives
s°(t), s°°(t), ... s(n)
(t); le plan de phase est l’espace à 2 dimensions formé par s(t) et s°(t)
cas des régimes oscillants non amortis (z = 0)
s°°(t) + ω0
2
s(t) = 0
s(t) = a cos ω0 t + b sin ω0 t⇒s°(t) = - a ω0 sin ω0 t + b ω0 cos ω0 t
les conditions initiales donnent: s(0+) = a et s°(0+) = b ω0
la courbe paramétrique représentant l’évolution du couple [s(t), s°(t)/ω0] dans le plan de phase est un
cercle centré sur l’origine et passant par le point des conditions initiales [s(0+), s°(0+)/ω0]
Remarques:
dans le cas où l’amortisse-ment z
n’est pas nul, la courbe représen-
tative est une spirale logarithmique
partant du point des condi-tions
initiales et convergeant vers le
centre du cercle;
il faut alors considérer la pulsation
propre amotie ωa et la pseudo-
période Ta
le centre du cercle représente le
régime permanent donné par le
second mem-bre de l’équation
différen-tielle (nul dans ce cas
précis).
2.2 solution particulière de l’équation avec second membre: régime forcé
cette solution paticulière de l’équation différentielle dépend intimement de la nature du second membre:
elle est de la même forme mathématique; elle représente la réponse forcée du système à une sollicitation
extérieure (entrée) représentée par le scond membre.
2.2.1 second membre constant (entrée échelon): réponse indicielle
réponse du premier ordre:
˙
s (t) + 1
τ s(t) = bo e(t)
où e(t) = E = Cte
on cherche une solution particulière du type sp(t) = S∞ (valeur finale)
après dérivation et identification on trouve: sp(t) = S∞ = t.b0.E
Académie de Martinique Préparation Agrégation Sciences Physiques B. Pontalier
Modélisation temporelle des Systèmes Linéaires page 3 /10
s°(t)
ωo
s(t)
t = 0+
t = k 2π
ωo
t = k "π
2 ωo
t = k π
ωo
t = k 3π
2 ωo
t
s(0+)
s°(0+)
ωo

réponse du second ordre:
s°°(t) + 2z ω0 s°(t) + ω0
2
s(t) = b0 e(t)
on cherche une solution particulière du type sp(t) = S∞ (valeur finale)
après dérivation et identification on trouve: sp(t) = S∞ = b0.E
ω0
2
la solution complète sécrit: s(t) = sg(t) + sp(t) = k e-t/τ + S∞
à l’instant t = 0+ la condition initiale vaut: s(0+) = k + S∞fik = s(0+) - S∞
s(t) = [s(0+) - S∞] e-t/τ + S∞
2.2.2 second membre fonction afine (entrée rampe): réponse tachymétrique
réponse du premier ordre:
s°(t) + 1 s(t) = b0 (At + B) où E = Cte
τ
on cherche une solution particulière du type sp(t) = at + b
après dérivation et identification on trouve: a = τ.b0.A et b = τ.b0 (.B - τ.A)
réponse du second ordre:
s°°(t) + 2z ω0 s°(t) + ω0
2
s(t) = b0 e(t)
on cherche une solution particulière du type sp(t) = = at + b
après dérivation et identification on trouve: a = b0.A
ω0
2
b = b0 (B - 2z.A)
ω0
2ω0
2.2.3 second membre impulsion de Dirac: réponse impulsionnelle
on applique au système une entrée e(t) = d(t) distribution de Dirac définie par:
d(t) = lim θ → 0 (1/ θ)
-∞ ∫ +∞
d(t) dt = 1 (aire unité)
pour t ∈ [0,θ]on considère que l’entrée est un échelon d’amplitude infinie et de durée nulle
pour t > θon considère que l’entrée est nulle
à partir de t = q = 0+ on considère que le système n’est plus soumis à aucune sollicitation extérieure et
qu’il va évoluer selon sa dynamique propre, c’est à dire sa réponse libre (sa
signature); le rôle de l’impulsion de durée quasi-nulle est d’apporter au système
des conditions initiales non nulles
calculons la valeur de la condition initiale apportée par l’impulsion de Dirac:
on peut assimiler pendant un temps aussi court la réponse du système à sa tangente à l’origine pour une
entrée échelon de valeur infinie et de durée nulle
Académie de Martinique Préparation Agrégation Sciences Physiques B. Pontalier
Modélisation temporelle des Systèmes Linéaires page 4 /10

exemple du système du premier ordre:
d
dt A 1- e
-t
τ
= A
τ e
-t
τ
au voisinage de t = 0, la pente vaut:
A
τ
or par définition de la distribution de Dirac: A = (1/ θ)
d’où à l’instant t = q = 0+ la valeur de la sortie (condition initiale) vaut:
s 0-
( )
= 1
θ θ
τ = 1
τ
sp (t) = 1
τ e
-t
τ
la réponse impulsionnelle est bien la signature du système puisqu’elle représente à une constante près
(caractéristique de ce système) sa réponse libre caractérisant sa dynamique propre.
2.2.4 second membre sinusoïdal: réponse harmonique
on applique au système une entrée (second membre) sinusoïdale de la forme:
e(t) = A (cos ωt + j sin ωt) = A e jωt
on cherche une solution particulière de la forme:
sp(t) = a [cos (ωt + ϕ) +j sin (ωt + ϕ)] = a e j(ωt+ϕ)
remarquons que l’opération de dérivation se résume à une multiplication par l’opérateur jω
réponse du premier ordre:
s°(t) + 1 s(t) = b0 A e jωt
τ
(jω) a e j(ωt+ϕ) + 1 a e j(ωt+ϕ) = b0 A e jωt
τ
(jω) a e j(ϕ) + 1 a e j(ϕ) = b0 A
τ
posons: S = a e j(ϕ) représentant l’amplitude complexe de sp(t) = a e j(ωt+ϕ) = S e jωt
on obtient:
(jω) S + 1 S = b0 A fiS [(jω) + 1] = b0 A fiS = b0 A = b0 A
τ τ 1 + jωt1 + jx
où x = ωτ = w /ω0 représente la pulsation réduite
ω0 = 1/τ représente la pulsation de coupure du premier ordre
cette amplitude complexe S = a e j(ϕ) a deux composantes:
- son module a = b0 A
√ 1 + (ωτ)2
- son argument ϕ = - arctan (ωτ)
Académie de Martinique Préparation Agrégation Sciences Physiques B. Pontalier
Modélisation temporelle des Systèmes Linéaires page 5 /10
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%