chapitre 4

MÉCANIQUE
chapitre 4
Cinématique
La cinématique est l’étude des mouvements indépendamment de leur cause. On s’intéresse donc dans ce
chapitre aux caractéristiques du mouvement d’un point de vue purement géométrique : allure de la trajectoire,
choix raisonné d’un repère, définition des vecteurs vitesse et accélération dans différents systèmes de coordonnées,
etc.
En première année, on se limite à la cinématique du solide ponctuel. Ainsi, on ne considèrera pas les mou-
vements de rotation d’un objet sur lui-même, et encore moins les problèmes de déformation des solides. En
deuxième année, la cinématique des fluides sera abordée.
Dans tout ce chapitre, on suppose que l’observateur dispose d’une horloge qui permet la mesure du temps.
En outre, l’espace est supposé euclidien à trois dimensions : il vérifie les axiomes d’Euclide, et entre autres
conséquences, la somme des angles d’un triangle vaut π. En réalité, le temps dépend de l’observateur (ce qui est
pris en compte dans la théorie de la relativité restreinte), et l’Univers dans lequel nous vivons n’est pas euclidien
(ce qui est pris en compte dans la théorie de la relativité générale).
Plan du chapitre.
1. Position, vitesse et accélération en coordonnées cartésiennes
1.1 Repérage d’un point
1.2 Vitesse
1.3 Accélération
1.4 Mouvement rectiligne
2. Position, vitesse et accélération en coordonnées cylindriques
2.1 Symétrie cylindrique
2.2 Repérage d’un point en coordonnées cylindriques
2.3 Repère local en coordonnées cylindriques ; vecteur position
2.4 Cas d’un mouvement plan
2.5 Vitesse
2.6 Accélération
2.7 Mouvement circulaire
3. Position en coordonnées sphériques
3.1 Symétrie sphérique
3.2 Repérage d’un point en coordonnées sphériques
3.3 Repère local en coordonnées sphériques

Mécanique chapitre 4 : cinématique
1 Position, vitesse et accélération en coordonnées cartésiennes.
1.1 Repérage d’un point.
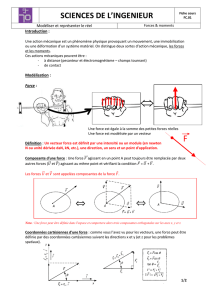
Le repérage d’un point, c’est-à-dire la définition de sa position, nécessite de munir l’espace d’une base ou
repère, qui est la donnée :
•d’un point O, centre du repère,
•de trois vecteurs linéairement indépendants, qu’on notera ~ux,~uyet ~uz.
Le repère (O, ~ux, ~uy, ~uz)est dit cartésien s’il est orthonormé direct. Ceci signifie que les vecteurs de base
sont :
•orthogonaux deux à deux (ortho) : ~ux·~uy=~ux·~uz=~uy·~uz= 0,
•de norme unité (normé) : k~uxk=k~uyk=k~uzk= 1,
•orientés par la règle des trois doigts ou la règle du tire-bouchon (direct).
On rappelle la règle des trois doigts : ~uxétant donné par la direction du pouce et ~uypar celle de l’index,
la direction de ~uzest donnée par le majeur tendu du côté de la paume, l’ensemble de l’opération étant réalisée
avec la main droite. La règle du tire bouchon s’applique de la façon suivante : un tire-bouchon tournant dans le
sens amenant ~uxsur ~uyavance dans la direction de ~uz.
M
O
x
y
z
ux
uy
uz
Un point M quelconque dans l’espace muni de la base cartésienne (O, ~ux, ~uy, ~uz)est repéré par le vecteur
position :
−−→
OM = x ~ux+y ~uy+z ~uz(1)
Le triplet (x, y, z)constitue les coordonnées cartésiennes de M. Il s’agit de la donnée des trois composantes
du vecteur position. Les coordonnées du centre du repère sont évidemment (0,0,0).
Lorsqu’un point se déplace, l’ensemble des positions successives qu’il prend au cours du temps constitue une
courbe appelée la trajectoire de ce point. L’équation paramétrique de la trajectoire est donnée par le système
des trois équations (x(t), y(t), z(t)). L’équation cartésienne de la trajectoire, qui relie x,yet z, est obtenue en
éliminant le temps dans le système d’équations paramétriques.
La distance du point M de coordonnées (x, y, z)au centre du repère O est :
−−→
OM
=q−−→
OM ·−−→
OM = px2+y2+z2(2)
On rappelle que d’une façon générale, si deux points M1et M2, ont pour coordonnées (x1, y1, z1)et (x2, y2, z2)dans
un repère orthonormé, la distance qui les sépare est donnée par :
−−−−→
M1M2
=p(x2−x1)2+ (y2−y1)2+ (z2−z1)2(3)
BCPST1 – Nicolas Clatin – septembre 2007 – CNM21 – page 2

Mécanique chapitre 4 : cinématique
1.2 Vitesse.
Considérons un mobile M qui se déplace sur sa trajectoire. À l’instant t, il occupe la position M(t); à l’instant
t+ dt, avec dtinfiniment petit, il occupe une position très voisine M(t+dt). Comme ces deux positions sont très
proches, le déplacement du mobile durant l’intervalle de temps dtest quasiment linéaire, donc confondu avec le
vecteur −−−−−−−−→
M(t)M(t+dt).
O
M(t)
M(t+dt)
Par définition, le vecteur vitesse à l’instant test :
~v = lim
dt→0
−−−−−−−−→
M(t)M(t+dt)
dt(4)
On cherche à exprimer le vecteur vitesse à l’instant ten fonction du vecteur position à cet instant. Soit O
l’origine du repère ; on a :
−−−−−−−−→
M(t)M(t+dt)=−−−−−−→
OM(t+dt)−−−−−→
OM(t)⇒~v = lim
dt→0
−−−−−−→
OM(t+dt)−−−−−→
OM(t)
dt(5)
Le vecteur −−→
OM étant une fonction du temps, le terme de droite correspond à la définition mathématique de
la dérivée de cette fonction à l’instant t, soit :
~v =d−−→
OM
dt(6)
Déterminons les composantes du vecteur ~v dans le repère cartésien (O, ~ux, ~uy, ~uz). Soit (x, y, z)les coordon-
nées de M(t); à l’instant t+ dt, les coordonnées ont évolué d’une quantité infinitésimale, c’est-à-dire que les
coordonnées de M(t+dt)sont (x+ dx, y + dy, z + dz). On a alors :
−−−−−−→
OM(t+dt)−−−−−→
OM(t)
dt=(x+ dx)~ux+ (y+ dy)~uy+ (z+ dz)~uz−x ~ux−y ~uy−z ~uz
dt
=dx ~ux+ dy ~uy+ dz ~uz
dt=dx
dt~ux+dy
dt~uy+dz
dt~uz(7)
Ce résultat s’obtient directement en dérivant le vecteur position donné par (1). Les vecteurs de base étant
constants, on peut les sortir de la dérivée :
~v =d(x ~ux+y ~uy+z ~uz)
dt=dx
dt~ux+dy
dt~uy+dz
dt~uz(8)
En adoptant la notation de Newton, qui consiste à indiquer la dérivée temporelle d’une variable à l’aide d’un
point surmontant cette variable, on a finalement :
~v =dx
dt~ux+dy
dt~uy+dz
dt~uz= ˙x ~ux+ ˙y ~uy+ ˙z ~uz(9)
Les composantes du vecteur vitesse sont donc :
BCPST1 – Nicolas Clatin – septembre 2007 – CNM21 – page 3

Mécanique chapitre 4 : cinématique
~v
vx= ˙x
vy= ˙y
vz= ˙z
(10)
La « vitesse » du langage courant mesure de combien le point se déplace par unité de temps. C’est la valeur
numérique du module du vecteur vitesse, exprimé en m·s−1, soit :
v=k~vk=√~v ·~v =p˙x2+ ˙y2+ ˙z2(11)
1.3 Accélération.
Le vecteur accélération est par définition la dérivée temporelle du vecteur vitesse, et par voie de conséquence
la dérivée seconde du vecteur position :
~a =d~v
dt=d2−−→
OM
dt2(12)
Les vecteurs de la base étant constants, la dérivation conduit immédiatement à :
~a =d2x
dt2~ux+d2y
dt2~uy+d2z
dt2~uz= ¨x ~ux+ ¨y ~uy+ ¨z ~uz(13)
Les composantes du vecteur accélération sont donc :
~a
ax= ˙vx= ¨x
ay= ˙vy= ¨y
az= ˙vz= ¨z
(14)
L’accélération physique est une grandeur vectorielle. Elle différe donc de l’« accélération » du langage courant,
qui signifie une augmentation de la vitesse au cours du temps (par opposition à la « décélération »). En physique,
le mobile en mouvement est accéléré si son vecteur vitesse varie au cours du temps, cette variation pouvant
correspondre à une modification de sa valeur numérique (augmentation ou diminution de k~vk), et/ou à une
modification de la direction du vecteur vitesse ~v.
Une augmentation de la vitesse (en norme) signifie que k~vkaugmente, soit que ~v2=~v ·~v augmente, soit
que :
d~v 2
dt>0(15)
La dérivation d’un vecteur obéit aux mêmes lois que la dérivation d’une fonction ; ici il s’agit d’une puissance,
donc :
d~v 2
dt= 2 ~v ·d~v
dt= 2 ~v ·~a (16)
On en déduit donc que l’« accélération » et la « décélération » du langage courant correspondent respecti-
vement à :
d~v 2
dt>0⇒~v ·~a > 0
d~v 2
dt<0⇒~v ·~a < 0
(17)
BCPST1 – Nicolas Clatin – septembre 2007 – CNM21 – page 4

Mécanique chapitre 4 : cinématique
1.4 Mouvement rectiligne.
1.4.1 Contraintes imposées par un mouvement rectiligne.
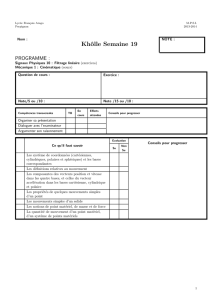
Il arrive que la nature du système étudié implique que le mouvement soit nécessairement rectiligne, c’est-à-
dire que le mobile M se déplace le long d’une droite. C’est le cas d’un anneau qui coulisse sur une tige, ou d’un
wagon qui se déplace sur un rail droit.
trajectoire rectiligne
ux
uy
uzO
M0 (t0)
x0
M (t)
xv0v
Le fait que le mouvement soit rectiligne entraine des simplifications de calcul, à condition de choisir un repère
adapté à la géométrie du problème. La droite support de la trajectoire joue un rôle particulier ; choisissons donc
un repère cartésien dont l’origine O est situé sur la droite, et dont un vecteur de base, par exemple ~ux, est selon
la direction de celle-ci.
Dans ce repère, supposons que le mobile M soit à la position M0d’abscisse x0à l’instant initial t= 0, et que
sa vitesse à cet instant soit ~v0. À une date t, il se trouve à l’abscisse xet sa vitesse est ~v. Comme le mouvement
est rectiligne suivant la droite (O, ~ux), les coordonnées yet zsont nulles à tout instant. Le vecteur position à
une date quelconque est donc de la forme :
−−→
OM = x ~ux⇒−−→
OM =
x
y= 0
z= 0
(18)
Par dérivation temporelle, on constate que la vitesse est nécessairement suivant (O, ~ux)à tout instant :
~v =d−−→
OM
dt= ˙x ~ux⇒~v =
vx= ˙x
vy= 0
vz= 0
(19)
De même, l’accélaration est également toujours suivant (O, ~ux):
~a =d~v
dt= ¨x ~ux⇒~a =
ax= ¨x
ay= 0
az= 0
(20)
En conséquence, si le mouvement est rectiligne, les vecteurs position, vitesse et accélération n’ont de com-
posante non nulle que suivant la direction du mouvement. De ce fait, le vecteur vitesse initiale est de la forme :
~v0=v0~ux=
v0
0
0
(21)
1.4.2 Condition pour avoir un mouvement rectiligne.
Si le mouvement est rectiligne, alors nécessairement ~a est un vecteur ayant toujours la même direction (celle
du mouvement). Est-ce une condition suffisante ?
Considérons un mobile soumis à une accélération de direction constante : ~a =a ~ux, telle que, à t= 0
l’accélération et la vitesse soient ~a0et ~v0. Il est évident que si ces deux vecteurs ne sont pas colinéaires,
l’accélération va modifier la direction de la vitesse et donc celle du mouvement.
Une accélération de direction constante est donc une condition nécessaire mais pas suffisante pour que le
mouvement soit rectiligne.
BCPST1 – Nicolas Clatin – septembre 2007 – CNM21 – page 5
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%