Signal 3 L`oscillateur harmonique

Signal 3 L’oscillateur harmonique
Lycée Polyvalent de Montbéliard - Physique-Chimie - TSI 1 - 2016-2017
Contenu du programme officiel :
Notions et contenus Capacités exigibles
Forces. - Utiliser les forces usuelles (force de rappel d’un ressort).
Mouvement horizontal sans frottement d’une masse ac-
crochée à un ressort linéaire sans masse.
Position d’équilibre.
- Établir et reconnaître l’équation différentielle qui caractérise un oscilla-
teur harmonique.
- Exprimer la solution compte tenu des conditions initiales.
- Caractériser le mouvement en utilisant les notions d’amplitude, de phase,
de période, de fréquence, de pulsation.
- Tracer le portrait de phase.
- Contrôler la cohérence de la solution obtenue avec la conservation de
l’énergie mécanique, l’expression de l’énergie potentielle élastique étant ici
affirmée.
- Déterminer, en s’appuyant uniquement sur des arguments physiques et
une analyse dimensionnelle, la position d’équilibre et le mouvement d’une
masse fixée à un ressort vertical.
En gras les points devant faire l’objet d’une approche expérimentale.
Table des matières
1 La force de rappel d’un ressort 1
1.1 Présentation des ressorts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Modélisation de la force de rappel du ressort . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Le système masse-ressort horizontal 2
2.1 Étudedynamique............................................ 3
2.2 L’équation différentielle de l’oscillateur harmonique . . . . . . . . . . . . . . . . . . . . . . . . 3
3 Approche énergétique d’un oscillateur harmonique 4
3.1 L’énergiecinétique........................................... 4
3.2 L’énergiemécanique.......................................... 5
3.3 Analyse des phases du mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.4 Leportraitdephase.......................................... 6
4 Le système masse-ressort vertical 7
4.1 Positionduproblème.......................................... 7
4.2 L’étatd’équilibre............................................ 7
4.3 Résolution................................................ 8
Beaucoup de systèmes en physique sont des systèmes oscillants. Nous l’avons vu par exemple lors de
l’étude des ondes. Si celles-ci contiennent des composantes sinusoïdales, c’est que le phénomène physique qui
leur a donné naissance l’est sans doute aussi. Nous introduisons dans ce chapitre le modèle de l’oscillateur
harmonique qui permet de décrire ce genre de comportements. Cet exemple est fondamental en physique,
et nous le retrouverons dans une multitude de systèmes physiques très différents, tant en mécanique qu’en
électricité.
1 La force de rappel d’un ressort
1.1 Présentation des ressorts
Un ressort est un fil de métal torsadé. Lorsqu’il est faiblement déformé, l’élasticité naturelle du matériau
tend à le faire revenir à sa configuration de départ.
Maxime Champion - www.mchampion.fr 1/8

Signal 3 : L’oscillateur harmonique Maxime Champion
Expérience 1 : Manipulation de ressorts
On constate en imposant un effort sur les ressorts que
si le ressort est comprimé, une force apparaît qui tend à l’étirer ;
si le ressort est étiré, une force apparaît qui tend à le comprimer.
Cette observation se schématise sur les figure 1.
O
0
−→
F
(a) Le ressort est plus étiré que le ressort à vide, la force
de rappel #”
Ftend à le comprimer.
O
0
−→
F
(b) Le ressort est plus comprimé que le ressort à vide,
la force de rappel #”
Ftend à l’étirer.
Fig. 1 – Schéma de la force de rappel #”
Fd’un ressort.
1.2 Modélisation de la force de rappel du ressort
Définition. Un ressort est caractérisé par
sa longueur à vide 0qui correspond à la longueur du ressort au repos ;
sa raideur kqui s’exprime en N/m.
Lorsque le ressort est déformé par une extrémité, celui-ci exerce une force de rappel sur cette même
extrémité. Cette force est donnée par
#”
F(t) = ±k((t)−0)#”
ex
avec (t)la longueur à l’instant tdu ressort et #”
exun vecteur unitaire dirigé le long du ressort.
Le signe de la force se retrouver avec un argument physique schématisé par la figure 1
si le ressort est étiré, soit −0>0, la force est dirigée pour le comprimer ;
si le ressort est comprimé, soit −0<0, la force est dirigée pour l’étirer.
Remarque : Cette modélisation n’est valable que pour les petites déformations. En effet, si
on tire trop fort sur le ressort, celui-ci va se déformer et ne reviendra pas à sa position initiale.
L’hypothèse élastique ne sera alors plus valable.
Dans un exercice, une des premières difficultés sera généralement l’expression de la longueur (t)en
fonction des données du problème. Cette expression doit être donnée dans le bilan des forces. Par ailleurs,
il faut toujours matérialiser la longueur à vide 0sur le schéma pour pouvoir faire la discussion sur le signe
de la force.
La discussion sur le signe de la force est toujours importante à mener et elle doit être réalisée au moment
du bilan des forces à l’aide du schéma. La difficulté vient du fait qu’il faut tenir compte de l’orientation
de la force sur le schéma, de l’orientation choisie sur le schéma pour le vecteur unitaire #”
exet du signe de
−0pour choisir le signe.
2 Le système masse-ressort horizontal
Nous étudions dans ce paragraphe le problème d’un ressort de raideur ket de longueur à vide 0fixé
à un mur par une de ses extrémité. On attache à l’autre extrémité une masse m. On étire le ressort d’une
certaine longueur Lpuis on lâche la masse sans lui communiquer de vitesse initiale.
Comme tout problème mécanique, nous allons réaliser toute l’étude à l’aide de la méthode présentée
dans le chapitre M2.
2/8

Signal 3 : L’oscillateur harmonique Maxime Champion
2.1 Étude dynamique
1. Le système étudié est la masse mdans le référentiel terrestre RTsupposé galiléen. Le problème sera
étudié en coordonnées cartésiennes.
2. On fait un schéma dans une situation quelconque en orientant la force de rappel.
O
0
x
#”
ex
−→
F
Fig. 2 – Schéma du problème du système masse-ressort horizontal.
3. Bilan des forces :
#”
F=±k((t)−0)#”
ex. Or, sur le schéma, on a (t)−0>0et la force dirigée selon
−#”
ex, ainsi, on a #”
F=−k((t)−0)#”
ex.
4. Seconde loi de Newton :
m#”
a=−k((t)−0)#”
ex.
5. Vecteurs cinématique : La position de la masse est donnée par le vecteur position #”
x=(t)#”
ex, la
vitesse vaut donc #”
v=˙
(t)#”
exet l’accélération #”
a=¨
(t)#”
ex.
6. On projette la seconde loi de Newton sur la direction exet il vient
m¨
(t) = −k((t)−0).(2.1)
De façon générale en physique, on écrit cette équation comme une équation différentielle sans coefficients
devant la dérivée d’ordre supérieure, soit
¨
(t) + k
m(t) = k
m0.
Remarque : A priori, le vecteur accélération peut avoir des composantes sur toutes les direc-
tions de l’espace. Or, en faisant la seconde loi de Newton, on constatera que l’accélération sur
les autres directions est nulle. De base, on considérera que le problème est unidirectionnel car
toutes les forces sont selon la même direction.
2.2 L’équation différentielle de l’oscillateur harmonique
Définition. Un oscillateur harmonique est un système physique décrit par la fonction (t)vérifiant
l’équation différentielle harmonique
¨
(t) + ω2
0(t) = ω0e(2.2)
avec ω0la pulsation propre du système et ela valeur d’équilibre de la fonction (t).
Remarque : Cette équation différentielle est à connaître sous cette forme par cœur.
Ici, la longueur d’équilibre du ressort vaut la longueur à vide 0.
Cette équation différentielle apparaît dans de très nombreux problèmes physiques, et elle apparaît
d’autant plus lorsque l’on étudie des petites perturbations d’un système autour d’un point d’équilibre.
Pour résoudre cette équation, on utilise la méthode établie dans le chapitre E3, qui est basée sur les règles
mathématiques de résolution d’équation différentielle.
Dans le problème du ressort horizontal, on constante ω0=sk
m.
3/8

Signal 3 : L’oscillateur harmonique Maxime Champion
Solution homogène : la solution de l’équation homogène est
1(t) = Acos ω0t+Bsin ω0t
avec Aet Bdes constantes. Il y a deux constantes car l’équation différentielle est d’ordre 2.
Remarque : On peut, de manière totalement équivalente, introduire les deux constantes sous
la forme 1(t) = Acos(ω0t+φ)avec Aet φles constantes.
Solution particulière : le second membre est constant donc la solution particulière est une constante
soit
2(t) = C=⇒0 + ω2
0C=ω2
00=⇒2(t) = 0.
Solution générale :
(t) = 1(t) + 2(t) = Acos ω0t+Bsin ω0t+0.
Conditions initiales : il est dit dans l’énoncé que (0) = Let que la masse est lâchée sans vitesse
initiale, soit v(0) = 0. Calculons d’abord la vitesse, on a v(t) = ˙
(t) = −ω0Asin ω0t+ω0Bcos ω0t. Ainsi,
les conditions initiales s’expriment
L=A+0+0et 0 = 0 + B .
Il vient B= 0 et A=L−0.
Ainsi, la position en fonction du temps de la masse est donnée par
(t)=(L−0) cos ω0t+0.
Cette fonction est tracée figure 3. On reconnaît la phase φ(t) = ω0t, la pulsation ω0, la fréquence f0=ω0
2π
et la période T=2π
ω0.
(t)
t
02(L−0)
T= 2π/ω0
L
Fig. 3 – Représentation graphique de la position de la masse msoumise à la force d’un ressort horizontal sans
vitesse initiale. La masse oscille autour de la position d’équilibre 0.
3 Approche énergétique d’un oscillateur harmonique
3.1 L’énergie cinétique
Définition. On définit l’énergie cinétique d’une masse manimée d’une vitesse #”
vRdans le référentiel
Rpar la relation
Ec(t) = 1
2mv2
R(t).
L’énergie cinétique dépend du référentiel d’étude car la vitesse en dépend.
Dans le problème précédent, la vitesse dans le référentiel d’étude vaut #”
v=˙
(t)#”
ex=−(L−0)ω0sin ω0t,
soit une énergie cinétique
Ec=1
2m˙
2(t) = 1
2m(L−0)2ω2
0sin2ω0t .
4/8

Signal 3 : L’oscillateur harmonique Maxime Champion
3.2 L’énergie mécanique
Repartons de l’équation différentielle (2.1) issue de la seconde loi de Newton, soit
m¨
(t) + k((t)−0)=0 (3.1)
Pour faire apparaître une équation de puissance, on multiplie par la vitesse ˙
(t). Il vient
m˙
(t)¨
(t) + k˙
(t)((t)−0)=0.(3.2)
On reconnaît, en utilisant la relation mathématique 2ff0= (f2)0,
m˙
(t)¨
(t) = d
dt1
2m˙
2(t)=d
dt(Ec(t)) .
De la même façon, on reconnaît
k˙
(t)¨
(t) = d
dt1
2k((t)−0)2.
Définition. On définit l’énergie potentielle élastique du ressort par la relation
Ep(t) = 1
2k((t)−0)2.
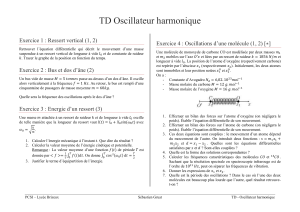
Application 1 : Vérifier que cette expression a bien la dimension d’une énergie.
Avec cette définition et ce qui précède, on constate que la relation (3.2) devient
d
dt(Ec(t) + Ep(t)) = 0 .(3.3)
Remarque : Cette méthode est totalement analogue à celle que nous avons utilisé en électricité
pour faire apparaître un bilan de puissance, à savoir la multiplication de la loi des maille par
le courant (ou la loi des nœuds par la tension).
Définition. On définit l’énergie mécanique d’un système comme la somme de l’énergie cinétique du
système et de toutes les énergies potentielles, soit
Em(t) = Ec(t) + Ep(t).
On constate par l’équation (3.3) que l’énergie mécanique du système se conserve.
Propriété. L’énergie mécanique totale d’un système décrit par une équation harmonique se
conserve.
Cette conservation a des conséquences fortes. En effet, l’oscillation ne s’arrête jamais, le système est toujours
en mouvement. En réalité, cela n’est pas possible car il y a toujours un terme de perte d’énergie, mais qui
est négligeable sur des durée suffisamment courtes.
3.3 Analyse des phases du mouvement
Application 2 : Donner l’expression mathématique de l’énergie potentielle élastique en fonction du
temps. En déduire à l’aide de l’expression de l’énergie cinétique que l’énergie mécanique se conserve
et donner sa valeur.
On déduit de l’application que l’énergie potentielle élastique et l’énergie cinétique sont des fonction de
période π/ω0. On peut les tracer en fonction du temps, comme cela est fait figure 4.
On peut trouver quatre phases du mouvement à l’aide de ce graphique, comme cela est visualisé dans
l’animation [1].
5/8
 6
7
8
6
7
8
1
/
8
100%