5 partie Dynamique d`un ensemble de particules

Mécanique Physique (S2) 5ème partie – page 1
5ème partie
Dynamique d’un ensemble de particules
Notes de cours
de Licence
de A. Colin de Verdière
On a surtout discuté dans les parties précédentes de la dynamique d’un seul corps.
L’interaction de ce corps avec les autres corps était prise en compte par une force ou une
énergie potentielle (fonction de la position de la seule particule considérée). L’hypothèse sous
jacente était donc que le mouvement du corps étudié ne modifiait pas vraiment les autres
corps avec lequel il interagissait. Mais c’est l’objet de ce chapitre de considérer le cas plus
réaliste de la dynamique d’un ensemble de N particules en interaction. Comme on peut le
concevoir, des difficultés calculatoires assez considérables apparaissent et la plupart des
applications considéreront le cas N = 2. Nous allons voir qu’il y a un point particulier, le
centre de masse, dont la dynamique se ramène à celle d’une particule affectée de la masse
totale du système.
Si on considère les mouvements relatifs de deux particules, on voit qu’elles peuvent
s’approcher/s’éloigner l’une de l’autre mais aussi tourner l’une autour de l’autre. Pour
analyser cette rotation, une quantité nouvelle va être introduite : le moment cinétique
(angulaire).
Une application particulière importante concerne la dynamique des corps rigides dont les
particules constitutives ne peuvent subir que des translations ou des rotations mais ne
s’éloignent pas ni ne se rapprochent (la distance entre deux points du corps est constante).
Mouvement du centre de masse d’un ensemble de particules
Soit un ensemble de N particules de masse mi et de vitesse vi observées depuis un référentiel
inertiel.
La quantité de mouvement totale de ces N particules s’écrit :
P =
!
i
pi =
!
i
"
mi vi
et la masse totale M : M =
!
i
mi
Considérons maintenant le mouvement d’une particule fictive affectée de la quantité de
mouvement totale P et de la masse totale M. Sa vitesse vc obéit à :
M vc = P
ou encore: vc = Σ mi vi/Σmi

Mécanique Physique (S2) 5ème partie – page 2
Cette particule est le centre de masse du système puisque vc n’est pas autre chose que la
vitesse du centre de masse rc = Σ mi ri/Σ mi (déjà rencontré en Statique).
(i) Si le système des N particules est isolé, il n’y a pas de forces extérieures. Chaque
particule en interaction obéit à la 2ème loi de Newton et ainsi la quantité de mouvement de la
particule i évolue comme :
!
d
dt pi=Fik
k
"
ou Fik est la force exercée par la particule k sur la particule i et la somme est effectuée sur
l’ensemble des particules k. Si maintenant on somme la relation précédente sur l’ensemble
des particules i on obtient le taux de changement de la quantité de mouvement totale :
!
d
dt
P=
i
"Fik
k
"
Cette double somme est assez impressionnante mais elle s’estime très facilement avec la 3ème
loi. En effet, chaque fois que l’on rencontre le terme Fik , on peut lui associer le terme Fki qui
vaut - F
ik d’apres la 3ème loi. Ainsi la double somme estimée en groupant les paires en
interaction est nulle. La contribution des forces intérieures est nulle. On en déduit que la
quantité de mouvement totale P est constante et que le centre de masse se déplace à vitesse
uniforme dans un référentiel inertiel. On peut alors choisir ce centre de masse d’un système
isolé comme référentiel inertiel et dans ce repère P = 0 (puisque
vc = 0). Ce repère lié au centre de masse va être d’une grande utilité.
(ii) Considérons maintenant le cas d’un
système non isolé. Soit le système S que nous
considérons et un autre système S’ avec lequel les
particules de S peuvent aussi interagir. Supposons
que la réunion de S et S’ soit isolée.
S pourrait être par exemple le système solaire et S’
le reste de l’univers. Comme la quantité de
mouvement totale de S + S’est conservée, on a :
P =
!
"pi
PS
{
+
!
"pj
PS'
{
= cste
Soit en dérivant par rapport au temps :
!
d
dt
P
S="d
dt
PS'
L’interaction entre les deux systèmes S et S’ est donc caractérisée par un échange de quantité
de mouvement.
S’
S

Mécanique Physique (S2) 5ème partie – page 3
On va écrire :
extS
dt
dFP =
(5.1)
où Fext est par définition la résultante des forces « extérieures » exercée sur S par les
particules de S’. Comme précédemment les forces « intérieures » entre deux particules i et k
du système S obéissent au principe d’action et reaction de sorte que la somme de ces forces
intérieures sur toutes les particules du système S est identiquement nulle et ne peuvent donc
changer la quantité de mouvement totale PS.
Si on ne s’intéresse qu’au mouvement d’ensemble d’un objet constitué de différentes parties,
(5.1) nous fournit l’équation d’évolution du centre de masse de l’objet qui se résume à
l’équation du mouvement d’une particule mais affectée de la masse totale :
!
Md
dt
vc=Fext
(5.2)
Cette forme de la 2 eme loi a été de fait utilisée précédemment. Est ce que toute la dynamique
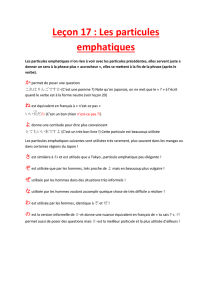
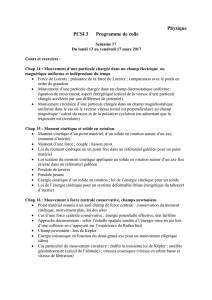
du système S est contenue dans 5.1 ? Evidemment non. Ici on lance en l’air une raquette de
tennis. Le mouvement du centre de masse C est donc celui d’une particule dans un champ de
gravité supposé constant soit une parabole. Dans la plupart des
exemples la gravité g est supposée constante et le poids est aussi
égal à celui d’une particule de masse M située au centre de masse
C qui se confond alors avec le centre de gravité. Lorsque ce n’est
pas le cas, centre de masse et centre de gravité diffèrent. Voir
partie « Gravitation ».
Sur le dessin on voit que tous les points de la raquette ne se
déplacent pas comme le centre de masse, car il y a aussi une rotation de la raquette autour de
C. Mais si on ne s’intéresse pas à cette rotation, le mouvement du centre de masse est
identique avec celui d’une particule de taille infinitésimale. Les sauts périlleux d’un plongeur
et autres vrilles du ski acrobatique ne doivent pas nous faire oublier que le centre de masse du
skieur est toujours contraint à se déplacer sur la parabole déterminée par son vecteur vitesse
initiale au moment précis où il quitte le tremplin.
On peut aussi considérer la situation d’une promenade à bicyclette à vitesse constante. Le
centre de masse décrit bien une droite mais pour autant le mouvement de certaines parties du
système sont bien différentes de celle du centre de masse. Regardez la trajectoire dans
l’espace d’un point de la roue pour vous en convaincre.
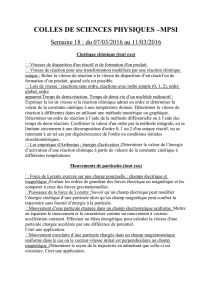
Le cas de deux particules
Considérons le cas particulier dit « à deux
corps » pour N = 2. Supposons qu’il n’y ait
pas de forces extérieures de sorte que le
système constitué de ces deux particules est
isolé.
0
m2
m1
F12
F21
r2
r1

Mécanique Physique (S2) 5ème partie – page 4
Pour chaque particule 1 et 2, on a :
!
dv1
dt =F
12
m1
dv2
dt =F21
m2
En soustrayant et en utilisant le fait que F21 = - F12 :
dt
d
(v12) =
)
m
1
m
1
(
21
+
F12
où v12 = v1 – v2 est la vitesse relative de 1 par rapport à 2.
On appelle µ la masse réduite telle que :
21 m
1
m
11 +=
µ
l’expression précédente donne :
12
12
dt
dF
v=µ
(5.3)
Mais il y a aussi conservation de la quantité de mouvement totale P=m1v1+m2v2. Si on choisit
comme repère inertiel le centre de masse C des deux particules alors P=0. On peut alors
calculer v1 et v2 en fonction de v12 :
!
v1=m2
m1+m2
v12
v2="m1
m1+m2
v12
(5.4)
Note : supposons que la particule 1 (un morceau de craie, un satellite, la lune) soit très petite
devant l’autre (par exemple la terre), alors m1/m2<<1 et on voit que 2 ne bouge quasiment pas
|v2| << |v1| et d’autre part v1 ≈ v12 et µ ≈ m1. Le mouvement de la grosse masse est négligeable
et c’est finalement la limite que l’on a utilisé dans toutes les applications jusqu'à présent.
Mais le cas général avec 5.1 montre que « le mouvement relatif des deux particules (par
rapport au référentiel inertiel du centre de masse) est équivalent à celui d’une seule particule
soumise à la force d’interaction dont la masse est la masse réduite. » Une fois ce problème
résolu on détermine les vitesses de chaque corps avec 5.4 et donc leur positions.
Les applications importantes de ce résultat concernent notamment l’interaction de deux corps
en interaction gravitationnelle.
.

Mécanique Physique (S2) 5ème partie – page 5
Applications de la conservation de la quantité de mouvement
Collisions
Une application majeure des résultats précédents concerne les collisions. Une collision arrive
quand deux objets se rentrent dedans : boules de billards, marteau-clou, automobiles, balles de
tennis sur une raquette, météores qui s’écrasent sur la terre. Par ailleurs toute la
compréhension du monde des particules sous-atomiques provient d’expériences de collisions
entre particules élémentaires (électrons, protons, neutrons, etc...).
On se rend compte dans tous ces exemples qu’une collision est associée avec des forces
importantes entre deux objets mais qui durent très peu de temps. Considérons 2 particules G
et D en collision :
La particule G crée une force F(t) sur D et D une force –F(t) sur G en vertu de la 3ème loi. Ces
forces vont changer la quantité de mouvement de chaque objet mais sans changer la somme
puisque ce sont des forces intérieures lorsque l’on considère le système des deux particules.
Ainsi :
pG + pD |AVANT = pG + pD |APRES
Cette conservation de la quantité de mouvement est le concept central dans l’étude des
collisions. Si on considère le changement de quantité de mouvement de D lors de la collision,
la 2ème loi nous dit :
dp = F(t) dt
pfinal – pinitial =
!
f
t
i
t
F(t) dt
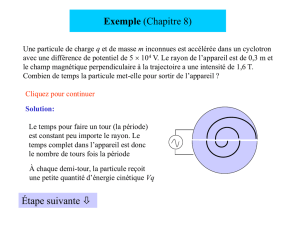
L’intégrale à droite définit l’impulsion I :
I =
!
f
t
i
t
F(t) dt
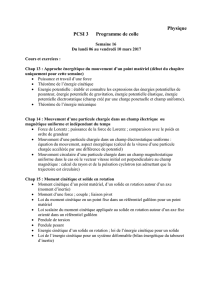
Si F(t) varie comme sur la figure, on voit que
l’impulsion est l’aire sous la courbe. Si Δt est la
durée de collision, la force moyenne est :
Fmoyenne ⋅ Δt = I. Ainsi la variation de quantité de
mouvement est elle égale à l’impulsion :
!
"p=I
F(t)
-F(t)
G
D
F
I
t
Δt
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%