Processus markoviens de sauts - Laboratoire de Statistique

Université de Rennes 2
Master de Statistiques Année 2006/2007
Second Semestre
Processus markoviens
de sauts
Arnaud Guyader


Table des matières
1 Cours 1
1.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Processus de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Distribution asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.4 Processus de vie et de mort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.4.1 Modèle général . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.4.2 Files M/M/1................................... 28
1.4.3 Files M/M/s ................................... 33
2 Exercices 39
A Annales 63
i


Chapitre 1
Cours
Introduction
Une chaîne de Markov en temps continu est un processus aléatoire (Xt)t≥0dont l’évolution future
est indépendante du passé sachant l’état présent. Par rapport aux chaînes de Markov en temps
discret (Xn)n∈, la différence se situe dans le fait que la chaîne peut changer d’état à n’importe
quel moment de T= [0,+∞[et non uniquement à des instants entiers. Lorsque le processus
(Xt)t≥0prend ses valeurs dans un espace d’états Eau plus dénombrable, typiquement Efini ou
E=, on parle encore de processus markovien de sauts.
1.1 Généralités
Les processus stochastiques servent à rendre compte de phénomènes dépendant à la fois du temps
et du hasard. On considère donc un espace probabilisé (Ω,F,)et une fonction
X:+×Ω→E
(t, ω)7→ X(t, ω)
représentant l’état du système étudié : X(t, ω), plus souvent noté Xt(ω), est donc l’état du système
à la date tpour une réalisation particulière ω.
Exemples.
– Une machine est ou bien en bon état de fonctionnement, état 1, ou bien en panne, état 0.
Lorsqu’elle est en panne, on appelle un réparateur, qui met un temps aléatoire à la réparer.
Dans ce cas E={0,1}est un espace d’états fini. Voir figure 1.1 en haut à gauche.
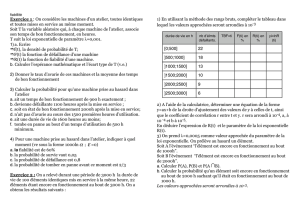
– On observe les arrivées à un péage d’autoroutes à partir d’un instant initial t= 0. Dans ce cas
l’espace d’états est E=et chaque trajectoire est croissante. Voir figure 1.1 en haut à droite.
– On étudie l’évolution d’une population au cours du temps : celle-ci peut augmenter (naissance)
ou diminuer (décès). Ici encore l’espace d’états est E=. Voir figure 1.1 en bas à gauche, où on
a représenté l’évolution pour deux populations différentes, donc deux trajectoires (Xt(ω1))0≤t≤T
et (Xt(ω2))0≤t≤T.
– Une puce se déplace par sauts, tous de même amplitude, sur une droite, avec choix de la direction
au hasard et à des instants aléatoires. On s’intéresse à sa trajectoire au cours du temps. Dans
ce cas on peut considérer comme espace d’états E=, ensemble des entiers relatifs. Voir figure
1.1 en bas à droite.
1
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
1
/
87
100%