QU AD RIPÔ LES LIN ÉA IRES - sur le site de Claude Lahache

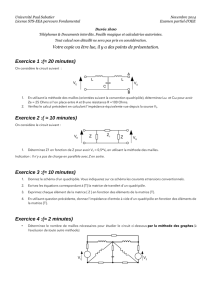
Un quadripôle est un élément comportant 4 bornes,
deux que nous plaçons sur sa gauche et deux sur sa droite.
De la façon la plus générale, le quadripôle considéré
effectue une opération de traitement du signal, telle que de
l’amplification ou du filtrage. On ne précise pas le sens du
transfert de l’information dans le quadripôle : La tension
d’entrée peut être u
1
ou u
2
, voire les 2 simultanément ! (Le quadripôle est alors bidirectionnel)
Les 2 courants i
1
et i
2
sont ainsi fléchés comme entrants dans le quadripôle (convention récepteur)
Pour aborder plus simplement cette étude, nous allons
tout d’abord considérer que le transfert de l’information est
unidirectionnel dans un quadripôle.
Dans ces conditions, les 2 bornes de gauche sont les bornes
d’entrée du circuit et celles de droite les bornes de sortie.
Il paraît alors plus logique de flécher les grandeurs de sortie
avec la convention générateur.
En fin de chapitre, nous donnerons un aperçu de l’approche généralisée des quadripôles, dans laquelle la
notion d’entrée et de sortie perd son sens.
Classification des quadripôles : On peut les classer selon qu’ils ont un comportement linéaire ou non,
selon qu’ils sont actifs ou passifs, selon qu’ils sont symétriques ou non…
7.1 Modélisation linéaire.
Considérons un quadripôle traitant un signal appliqué
sur ses bornes d’entrée.
Ce quadripôle est inséré dans une chaîne électronique ; il
est ainsi connecté, côté entrée, à un générateur de commande,
et à une impédance de charge, côté sortie.
Le fait que ce quadripôle soit qualifié de linéaire signifie qu’il
ne renferme que des éléments dont le comportement est linéaire.
(C’est à dire que les relations qu’on peut écrire entre les différentes grandeurs internes sont linéaires)
Une conséquence du comportement linéaire est que l’application en entrée d’un régime sinusoïdal entraîne que
toutes les grandeurs électriques sont sinusoïdales pour le quadripôle.
Dans ce qui suit, les quadripôles fonctionnent en régime sinusoïdal établi.
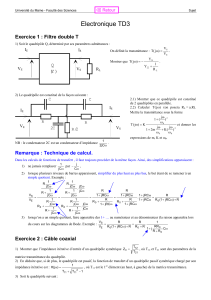
7.1.1 Modèle d’entrée.
Pour le générateur de commande (e
G
; Z
G
), le
quadripôle représente un récepteur.
Il est donc vu comme une impédance Z
E
Cette impédance est nommée impédance d’entrée ;
E
E
E
I
U
Z= soit
E
E
E
I
U
Z= en module
i1 i2
u1
u2
i1 i2
u1
u2
ie is
ue
us
Q
ie
ue
Ze
ZG
e
G

Elle n’a, le plus souvent, aucune existence physique, mais résulte d’un calcul.
L’impédance d’entrée peut dépendre des conditions de fonctionnement du quadripôle, en particulier de la
charge à laquelle sa sortie est connectée.
Exemple : Impédance d’entrée d’un circuit RC chargé.
Pour une valeur quelconque de R
u
ω+
+= CjR1 R
RZ
u
u
E
On définit les 2 valeurs limites pour Z
E
:
En sortie à vide ω
+= jC
1
RZ
EV
En sortie court-circuitée
RZ
ECC
=
7.1.2 Nature de la commande
.
-
Commande en tension
: L’entrée du quadripôle « voit »
un générateur de tension.
u
E
= e
G
si Z
G
→
0 ou si Z
E
→
∝
ceci correspond à une condition stricte ;
toutefois, de façon approchée, on admet que le quadripôle
est commandé en tension si Z
E
>> Z
G
-
Commande en courant
: L’entrée du quadripôle « voit »
un générateur de courant.
i
E
= i
G
si Z
G
→
∝
ou si Z
E
→
0 ;
(condition stricte)
ici également, on considère la commande en courant
réalisée de façon approchée si Z
G
>> Z
E
7.1.3 Modèles de sortie.
Pour la charge, le quadripôle est assimilable à un générateur.
Dans la mesure où il fonctionne de façon linéaire, cet électromoteur se décrit par une structure de Thévenin
ou de Norton.
On appelle impédance de sortie d’un quadripôle, l’impédance interne du générateur modèle de sa sortie.
Remarquer que la source active de ce générateur est une
source commandée
par une grandeur d’entrée.
Comme nous avons 2 grandeurs d’entrée (i
E
et u
E
) et 2 structures de générateur de sortie (Thévenin ou
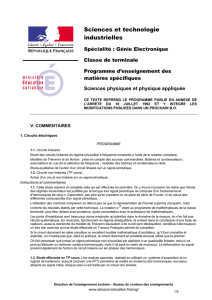
Norton), nous aurons 4 possibilités pour décrire la sortie d’un quadripôle :
Quadripôle commandé en tension
A
0
est l’amplification en tension à vide Y
CC
est l’admittance de transfert en court-circuit
R
C
Ru
uS uE
ZG
ZE
e
G
iE
uE
i
G
ZG ZE
iE
uE
ZS
ZE
A0uE
YCCuE
ZS
u
E
iE
ZE
u
E
iE
uS
iS
uS
iS

Quadripôle commandé en courant
Z
T
est l’impédance de transfert à vide A
iCC
est l’amplification en courant en court-circuit
Remarque 1 : L’impédance de sortie peut dépendre de l’impédance de sortie du générateur de commande.
Exemple : Impédance de sortie d’un quadripôle RC.
Calculons l’impédance de sortie du
circuit RC précédent, commandé par un générateur
décrit par {e
G
; R
G
}
En appliquant le th. de Thévenin, on neutralise e
G
;
entre S
1
et S
2
, on voit l’impédance équivalente à
R + R
G
en parallèle avec C :
ω++
+
=C)RR(j1 RR
Z
G
G
S
Selon R
G
, Z
S
peut varier entre 2 extrêmes :
- Pour une commande en tension (R
G
→
0)
ω+
=jRC1 R
Z
SU
- Pour une commande en courant (R
G
→
∝
)
ω
=jC
1
Z
SI
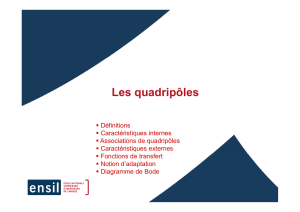
Remarque 2 : Calcul d’impédances de sortie en présence de sources commandées dans les schémas.
Ce cas est typique dans l’étude des amplificateurs ; d’après le théorème de Thévenin, on ne neutralise en effet
que les sources dites « autonomes » (qui ne dépendent en fait d’aucune autre grandeur interne au circuit
étudié).
Dans les étages à transistors, par exemple, intervient le
modèle « petits signaux » du transistor (cf. ci-contre)
Nous verrons lors de leur étude que 2 cas peuvent se produire,
selon que le courant i
B
disparaît ou non lors de la neutralisation
de la source de commande de l’étage.
ZS
ZE
ZTiE
AiCCiE
ZS
uE
i
E
ZE
uE
i
E
uS
iS
uS
iS
R
C
RG
S1
eG
S1
S2
β
ββ
β
i
B
ρ
r
iC
vCE vBE
iB

7.2 Cascades de quadripôles.
Dans les chaînes de traitement analogique de signal, les différent blocs fonctionnels, assimilables à
des quadripôles, s’enchaînent (l’un au bout de l’autre). Ce type d’association se nomme « cascade »
Considérons une cascade élémentaire de 2 quadripôles linéaires
Q
1
et
Q
2
, commandée par un générateur
{e
G
, R
G
}, et chargée par une résistance R
U
. Pour simplifier, supposons toutes les impédances résistives pures.
Recherchons le modèle linéaire du quadripôle
Q
équivalent à la cascade de
Q
1
et
Q
2
.
Résistance d’entrée
.
La résistance d’entrée de la cascade est
E
E
E
i
u
R=
; c’est la résistance d’entrée R
E1
du 1
er
quadripôle !
(Compte-tenu de la présence des autres étages, éventuellement (cf. 711))
Résistance de sortie.
C’est la résistance interne du générateur « vu » par la charge R
U
; pour la définir, nous débranchons R
U
, puis
nous neutralisons la seule source autonome du schéma, c’est à dire e
G
.
Si e
G
devient nulle, u
E
s’annule ; d’où disparition de la source A
1
u
E
, donc de la tension u et de la source A
2
u !
Finalement, il ne reste plus que la résistance R
S2
entre les 2 bornes de sortie de la cascade, et la résistance
cherchée n’est autre que R
S2
.
La résistance de sortie d’une cascade d’étages est la résistance de sortie du dernier étage.
(Compte-tenu de la présence des autres étages, éventuellement (cf. 713))
Source active de sortie.
Selon que l’on veuille décrire la sortie de la cascade par un générateur de Thévenin ou de Norton, on
recherche la tension de sortie à vide ou le courant de sortie en court-circuit de la cascade.
D’après le schéma proposé ci-dessus, la fém. de sortie de la cascade est e
TH
= A
2
u.
Or,
E1
1S2E
2E
uA
RR R
u+
=
Finalement, nous pouvons écrire :
E
1S2E
2E
21EéqTH
u
RR R
AAuAe +
==
Noter que l’amplification en tension à vide globale est strictement inférieure au produit des amplifications en
tension à vide des différents étages.
Finalement, la cascade considérée se ramène au quadripôle
Q
ci dessous :
RS1
RE1
A1uE
u
E
iE
u
i RS2
RE2
A2u uS
iS
RU
RG
eG
Q
1
Q
2
RE1
u
E
iE RS2
E
1S2E
2E
21
u
RR R
AA +
uS
iS
RU
RG
eG
Q

Remarque : Liaisons entre quadripôles.
-
Liaison continue : La liaison est directe (fil)
-
Liaison capacitive : Cas classique entre les étages
à transistors ; le continu et les plus basses fréquences
ne peuvent pas être transmis.
-
Liaison par transformateur : Se rencontre entre 2
circuits accordés pour adapter une bande passante,
ou en liaison entre étage de puissance et haut-parleur.
Là aussi, ce type de liaison interdit la transmission
du continu et des fréquences les plus basses.
7.3 Adaptations d’impédances.
Le problème consiste à obtenir une certaine relation d’ordre entre l’impédance de sortie d’un
quadripôle et l’impédance d’entrée du suivant, afin d’optimiser le transfert d’une grandeur électrique donnée.
Au départ, cette relation d’ordre n’est pas satisfaite ; la solution généralement adoptée consiste à intercaler un
quadripôle adaptateur entre les 2 quadripôles.
7.3.1 Adaptation en tension.
Ce cas est fréquent en électronique : Il s’agit de réaliser la commande en tension d’un quadripôle par
un autre.
La commande en tension nécessite u
≈
e
1
, ce qui ne peut
être résolu que par i = 0.
Il faudrait vérifier R
1
<< R
2
pour qu’il en soit ainsi.
Si ça n’est pas le cas, on intercale un quadripôle
adaptateur nommé
suiveur de tension
, caractérisé
par une impédance d’entrée infinie, une impédance
de sortie nulle et une amplification en tension unitaire.
Ainsi, le quadripôle amont fonctionne-t-il à vide et
u = e
1
; le quadripôle aval voit un générateur de
tension u = e
1
.
C
RG
RE
eG
RG
RE
eG
R1
R2
e1 u
i
R1
R2
e1 u
i
0
u
Quadripôle suiveur de tension
u u
0
Exemple : Suiveur de tension à A. Op
 6
7
8
6
7
8
1
/
8
100%