Chapitre 2 Dynamique du point matériel

19
Chapitre2
Dynamiquedu pointmatériel
Leprécédentchapitres’estlimitéàl’étudedesélémentscinématique,c’estàdirelasimple
description d’un mouvement (position,vitesse,accélération),dansdi¤érents systèmesde co-
ordonnées.Le chapitreprésentvasepenchersurlescausesdu mouvement: l’objectifest,
à partirdesactionsouforcess’exerçantsurlepointM,de calculercommentsontmodi-
…ées sonaccélérationetsavitessepouren déduiresonmouvement.Ce chapitre comporte
un certain nombredeloisou principespermettantderelierforcesetélémentcinématiques.
Desloisou principes sontdesrelationsquinesedémontrentpas: ils sevéri…entsimplement
expérimentalement,etrestentposésdèsqu’aucune expérience nelesamise en défaut.
2.1.LesloisdeNewton: les3principes
LesloisditesdeNewtonontétéposéespourl’essentielauXVIIiµemesiècle etdébut
XVIIIiµemeparGalilée etNewton.Aujourd’hui, soit300 à 400 ansplustard,ellesn’ontpas
étéremisesencausetantquel’onrestedansleslimitesdelamécanique classique.
2.1.1.La premièreloi deNewton : leprinciped’inertie
Soitun pointMdemassem.
Dé…nition
Onditqu’unsystème estisolé(parexemplelepointM) sice systèmenesubitaucune
action(aucuneforce)del’extérieur.
En pratique,un systèmeisolé est trèsdi¢cileà obtenir!Ilfaudraitplacerl’objetdans
l’espace, loin detouteautremasse.Poure¤ectuerune expérience surou prochedelaTerre
parexemple,ilfaudrase contenterdesystèmespseudo-isolés.
Dé…nition
Unsystème estditpseudo-isolésitouteslesactionsextérieures se compensent.
C’estparexemplele casenimpesanteurdansunsatellite enorbiteautourdelaTerre.
PremièreloideNewtonou principed’inertie
DansunréférentielGaliléenR(appelé égalementréférentield’inertie),lemouvementd’un
pointisolé estrectiligneuniforme(ouaurepos).
Dé…nition du référentielGaliléen
Sadé…nitionestenréalitédonnée implicitementparleprinciped’inertie:on prend le
référentielRétudié,onyplace un pointisolé(ou pseudo-isolé)demassem,etonobserve
sonmouvementdansR.Sisonmouvementestrectiligneuniforme, leréférentielestalorsdit
”Galiléen”.Concrètement,d’aprèscettedé…nition, ladéterminationducaractèreGaliléenou
non d’un référentielestpurementexpérimentale.Nousallonsmaintenantrechercherd’autres
critèrespermettantdes’abstenird’e¤ectuercette expérience àchaquefoisquel’onconsidère
un nouveauréférentield’étude.
Pourcela,un référentielGaliléen, leréférentieldeCopernic estdé…ni.
L.Menguy,Lycée Montesquieu,LeMans21 novembre2003

20 Chapitre2Dynamiquedu pointmatériel
LeréférentieldeCopernicasoncentreaucentrede gravitédusystèmesolaire;sestrois
axes sontdé…nisparlestroisdirectionsde3étoilestrèséloignées (etdoncsupposées…xespar
rapportaucentrede gravitédusystèmesolaire).
Parlasuite,onleprendracommeréférence,etseulslesréférentielsentranslationrectiligne
uniformepar rapportauréférentieldeCopernicsontconsidéréscomme étantGaliléens.
Leréférentielterrestre(référentiel…xéàlaTerre)est-il Galiléen?
Entouterigueur, il nel’estpas,caril tournedansleréférentieldeCopernic(rotation dela
Terresurellemême etrotation delaTerreautourdu soleil).En pratique,àpartirdu moment
oùl’expérience sedéroulesurunedurée trèsinférieureàunejournée,on pourraquasimentle
considérercomme étantGaliléen.
2.1.2.La deuxièmeloi deNewton ; leprincipefondamental de
la dynamique
LadeuxièmeloideNewtonrelielesforces s’appliquantsurun pointMàl’accélération du
pointM.
Uneforce s’appliquantsurun pointmatérielMalesmêmescaractéristiquesqu’un vecteur:
elleaunedirection,un sensetsonaction,plusoumoinsimportante,semesureparune
intensité.Cetteforce estdoncreprésentée parun vecteur¡!
F.
Expérimentalement,on peutobserverquel’application d’uneforce ¡!
Fsurlepointmatériel
MaccélèrelemouvementdecepointM;cetteaccélération notée ¡!
aseproduitdanslamême
direction, lemêmesensquelaforce etestproportionnelleàcetteforce.Laconstantede
proportionnalité entre¡!
Fet¡!
aestlamassemdu pointM.
Leprincipefondamentaldela dynamiques’énonce alorscommesuit:
¡!
F=m¡!
a(M)=R
Dé…nition
Laquantitédemouvementnotée ¡!
pd’unpointmatérielMdemassemsedéplaçantà
une vitesse¡!
vestpardé…nition:
¡!
p=m¡!
v
Leprincipefondamentaldeladynamiquedevientalors:
¡!
F=md¡!
v
dt=d(m¡!
v)
dt:
Cecipermetd’écrirelethéorèmedelaquantitédemouvement (quiestexactementlamême
chosequeleprincipefondamentaldeladynamique):
¡!
F=d¡!
p
dt:
Remarque2.1Siplusieursforces s’appliquentsurlepointM,leursactions s’additionnent:
X¡!
Fext!M=m¡!
a(M)
21 novembre2003 L.Menguy,Lycée Montesquieu,LeMans

Section2.2Lesforces21
ou
X¡!
Fext!M=d¡!
p
dt;
¡!
Fext!Msontlesforces s’appliquantsurM.
2.1.3.Latroisièmeloi deNewton:leprincipedesactions
réciproques
Soituneforce ¡!
Fquiestcréée parun pointP(ditacteur)surun pointM(ditreceveur).
On noteFP!Mlaforce appliquée parPsurM. Ona:
¡!
FP!M=m¡!
a(M):
Enfait,onconstatequesiPagitsurM,alors systématiquement,Magitégalementsur
Pdemanièreréciproque,selonlamêmedirection, lamêmeintensité,maisdansdes sens
di¤érents.C’estleprincipedesactionsréciproques:
¡!
FP!M=¡¡!
FM!P:
Exemples:chocdedeuxparticules,attractionCoulombiennedesdeuxcharges,attraction
gravitationnellededeuxmasses...
2.2.Lesforces
2.2.1.Laforcedegravitation
Laforce degravitation,appelée aussiforce d’interactiongravitationnelle,aétédécritepour
lapremièrefoisparNewtonen1650.Elledécritl’attractionentredeuxmassesplacéesl’uneau
voisinagedel’autre.Cetteactionestgénéralementdefaibleintensité,saufquand desmasses
trèsimportantes,commeleTerreparexemple, interviennent.
Expérimentalement,on peutvéri…erquel’attractionentrelesdeuxmassesestproportion-
nelleàlavaleurde chacunedesmasses,etinversementproportionnelleaucarrédeladistance
qui les sépare.Cetteforce étantattractive,eten notantGlaconstantedeproportionnalité, la
force degravitationentrelesdeuxpointMetPdemassesrespectivesmPetmMetdistants
derest:
¡!
FP!M=¡GmPmM
r2¡!
eP!M:
¡!
FP!Mestlaforce créée parPets’appliquantsurM,et¡!
eP!Mestlevecteurunitaire
dirigédePversM;
G=6:67259 £10¡11 m3kg¡1s¡2estlaconstanteuniverselledegravitation.
Laforce degravitation peutaussis’écriresouslaformesuivante:
¡!
FP!M=¡GmPmM
¡¡!
PM
PM3:
L.Menguy,Lycée Montesquieu,LeMans21 novembre2003

22 Chapitre2Dynamiquedu pointmatériel
Uncasparticuliertrèscourantetdoncimportantestl’attraction d’unemassemd’un objet
parlaTerredemasseMT:
¡!
FP!M=¡GmMT
R2
¡!
N(1)
avec Rladistance séparantl’objetdu centredelaTerre(ensupposantquel’on puisse consi-
dérerquel’attraction delaTerreseramèneàcelled’un pointMplacé aucentredeTerre
etdemasseMT,ce quiseraultérieurementdémontré cetteannée).¡!
Nestlevecteurvertical
dirigédu centredelaTerreversl’objet.
Larelation(1)s’écritplus simplement:
¡!
FP!M=m¡!
g
avec
¡!
g=¡GMT
R2
¡!
N:
¡!
greprésentele champ depesanteurdelaTerre; il diminueaufuretàmesurequel’on
s’éloignedelaTerre.Alasurface delaTerrele champest:
¡!
g0=¡GMT
R2
T
¡!
N;
avec RTlerayon delaTerre.Aunealtitudeh, le champ depesanteurestalors:
¡!
g=¡!
g0µRT
RT+h¶2
:
2.2.2.L’interactionCoulombienne
L’interactionCoulombienne estuneforce s’appliquantentredeuxpointsMetM0de
chargesrespectivesqetq0.Commepourl’interactionNewtonienne,sonintensité estinverse-
mentproportionnelleàladistance raucarréqui les sépare.Cetteforce estdepluspropor-
tionnelleauxchargesqetq0;elles’écrit:
¡!
FM0!M=1
4¼²0
qq0
r2¡!
eM0!M:
Laconstantedeproportionnalitévaut
1
4¼²0
=9:10¡9SI:
On peutaussinoter
¡!
FM0!M=qµ1
4¼²0
q0
r2¡!
eM0!M¶=q¡!
E(M)
avec ¡!
E(M)le champélectrique créée parlachargeq0enM.
21 novembre2003 L.Menguy,Lycée Montesquieu,LeMans

Section2.2Lesforces23
2.2.3.L’interactionélectromagnétique
Commenousvenonsdelevoir,une chargeqen présence d’un champ¡!
Ecrée uneforce
¡!
F=q¡!
E(M):
Demanièreplusgénérale, laprésence d’un champélectro-magnétique(champs¡!
Eet¡!
B)
créée uneforce
¡!
F=q³¡!
E(M)+¡!
v^¡!
B(M)´:
2.2.4.Lesforcesdecontact
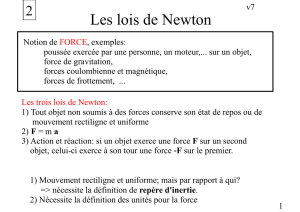
2.2.4.1.Réaction d’un support
Considéronsun objetplacé surun supportsolide.L’objetnepeutpaspénétrerdansle
support:ilyauneforce appelée réaction du supportetnotée ¡!
RNquis’yoppose.Cetteréaction
s’appliquesurl’objetau niveauducontactobjet-support,etsadirectionestorthogonaleàla
surface du supportau niveau du contact.
S
RN
mg
M
Fig.2.1.
2.2.4.2.Lefrottementsolide
Considéronsànouveaulesupportprécédentsurlequelestplacé l’objetM.Poussonscet
objetàl’aided’uneforce ¡!
Fa…n delafaireglissersurlesupport.Sicetteforce depoussée n’est
pas su¢sante, l’objetnebougepas: il yaune certainerésistance au déplacement,appelée
force defrottementsolide etnotée ¡!
RT.Cetteforce s’oppose exactementànotrepoussée...
Toutefois,si l’on pousseavec su¢sammentd’intensité, l’objetsemetàbouger: laforce de
frottementsolidea atteintsavaleurlimitequ’ellenepeutpasdépasser;on noterasonintensité
limiteRTlim.
L.Menguy,Lycée Montesquieu,LeMans21 novembre2003
 6
7
6
7
1
/
7
100%