7 partie Les forces liées à la rotation Applications à la terre.

Mécanique Physique (S2) 7
ème
partie – page 1
7
ème
partie
Les forces liées à la rotation
Applications à la terre.
Notes de cours de
Licence de Physique
de A. Colin de Verdière
Pour un physicien observant des résultats d’expériences sur la terre, la rotation de celle-ci
pose problème puisque le référentiel terrestre n’étant pas inertiel, on ne peut pas appliquer la
2
ème
loi de Newton. Le but de ce chapitre est de voir comment la 2
ème
loi doit être modifiée
lorsque le référentiel est en rotation solide. Pour autant, observateurs terriens, nous utilisons la
2
ème
loi telle quelle en permanence ! Cela veut il donc dire que les modifications cherchées ne
sont pas très importantes? Ce n’est pas si simple et on va voir qu’elles peuvent devenir
importantes sur des échelles spatiales suffisamment grandes. Aux échelles de temps et
d’espace de nos activités quotidiennes, on serait bien en mal de trouver une expérience de
laboratoire qui révèle que la terre tourne
*
. Et pourtant, cette terre tourne vite : c’est à
l’équateur que vous êtes le plus éloigné de l’axe de rotation de la terre et votre vitesse vaut Ω
R
T
≈ 466 m s
-1
où R
T
le rayon terrestre ≈ 6 370 km et Ω = 7,292 10
-5
s
-1
. C’est pour les
mouvements de grande échelle de temps et d’espace (typiquement des temps supérieurs à la
journée et des distances supérieures à quelques kilomètres) que la rotation induit une nouvelle
dynamique. On a déjà vu dans la partie 6 un effet de la rotation qui a un peu déformé la terre
et on a déjà montré comment on peut additionner (vectoriellement) l’accélération centrifuge et
la gravité pour obtenir une gravité effective qui n’est plus radiale mais on ne voit pas bien de
nouveaux effets qui pourraient résulter de cette gravité légèrement corrigée des effets de la
rotation.
Y a t-il autre chose ?
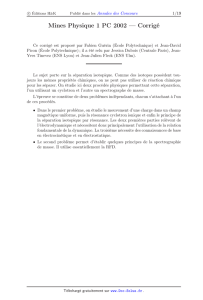
La façon la plus directe de
voir de nouveaux effets est de
considérer une particule libre
dans un repère inertiel. Sa
trajectoire rectiligne uniforme
située dans le plan équatorial
xy est indiquée ci-dessous.
J’ai pris une vitesse de 1 m s
-1
et indiqué la position de la
particule tous les mois.
L’autre trajectoire en forme de
spirale est la trajectoire de la
même particule observée
depuis le référentiel terrestre.
Le vecteur Ω
ΩΩ
Ω, perpendiculaire
à la figure, pointe vers le
*
Les expériences de lavabos qui se videraient dans des sens différents selon l’hémisphère Nord ou Sud sont
citées à tort.

Mécanique Physique (S2) 7
ème
partie – page 2
lecteur et le référentiel tourne dans le sens positif (contraire aux aiguilles d’une montre). La
particule a été lâchée de l’origine prise sur l’axe de rotation à t = 0.
Si la particule était immobile dans le repère inertiel, sa trajectoire dans le repère terrestre
serait évidemment un cercle mais décrit dans le sens opposé (vitesse angulaire - Ω) : c’est le
cas par exemple des étoiles fixes vues de la terre.
Cette spirale vue par un observateur terrestre est évidemment interprétée par cet observateur
comme le résultat de forces s’appliquant sur cette particule car sans ces forces la particule
devrait se déplacer en ligne droite. Comme il n’y a aucune force dans le repère inertiel on
s’aperçoit que c’est la place de l’observateur dans le référentiel en rotation qui est la cause de
ces forces, des pseudo-forces car uniquement dues au choix du référentiel tournant. Vous
remarquerez que ces forces sont faibles car l’échelle est graduée en milliers de km et que la
déviation sur la droite qui apparaît ne devient significative qu’au bout d’un mois.
Pour aller plus loin on peut se dire que si les positions des points de la spirale sont connues en
fonction du temps, on peut avoir accès aux pseudo-forces en dérivant les positions deux fois
par rapport au temps. Si on connaît la position d’un point P(x,y) dans un repère inertiel, le
premier objectif est donc de trouver les coordonnées de ce même point P dans un repère qui a
tourné d’un certain angle θ (cad de reconstruire la figure ci dessus).
Sur le dessin, l’abscisse x’ de P est tout simplement OH où H est la projection orthogonale de
P sur Ox’. Ainsi si e
x’
est le vecteur unitaire selon Ox’ :
x’ = OP ⋅ e
x’
Les coordonnées de e
x’
dans le repère Oxy sont de même les projections orthogonales de e
x’
sur Ox et Oy à savoir cos θ et sin θ respectivement. En effectuant le produit scalaire ci dessus
on trouve :
x’ = x cos θ + y sin θ
et de même : y’ = - x sin θ + y cos θ
[car e
y’
a pour coordonnées (- sin θ, cos θ) et y’ = OP ⋅ e
y’
].
Maintenant que l’on sait obtenir les coordonnées d’un point dans un référentiel x’y’ tourné
d’un angle θ par rapport à un autre, on voit immédiatement que l’on sait obtenir les
y’
O x
P
y
x’
e
x’
e
y’
θ
H

Mécanique Physique (S2) 7
ème
partie – page 3
coordonnées dans un repère en rotation solide à la vitesse angulaire Ω dont l’axe z est
perpendiculaire au plan xy. On peut choisir l’origine des angles telle que :
θ = Ωt
et on a :
=Ω+Ω−= Ω+Ω=
z'z
tcosytsinx'y
tsinytcosx'x
(1)
Les coordonnées dans la direction z de l’axe de rotation ne changent évidemment pas. Voilà
cette formule de changement de coordonnées est la seule chose dont nous ayons besoin pour
relier les points d’une trajectoire dans un repère inertiel et dans un repère tournant.
Maintenant si une particule est libre dans le repère inertiel, sa trajectoire est :
x = ut
y = 0
z = 0
où on a choisi x = 0 à t = 0 par simplicité. En injectant dans (1), la trajectoire dans le repère
tournant obéit à :
x’ = ut cos Ωt
y’ = - ut sin Ωt (2)
z’ = 0
L’équation en coordonnées polaires r’, θ permet d’apprécier que la trajectoire est celle de la
spirale d’Archimède :
r'
=
u t
θ
=−Ωt
⇒r'=− u
Ω
θ
Mais ce sont les forces qui nous intéressent. Dans le repère inertiel aucune car
x
&&
= 0. Dans le
repère en rotation, la vitesse vaut :
=ΩΩ−Ω−= ΩΩ−Ω=
0'z
tcostutsinu'y
tsintutcosu'x
&
&
&
(3)
et l’accélération :
=ΩΩ+ΩΩ−=
ΩΩ−ΩΩ−=
0'z
tsinuttsinu2'y
tcosuttsinu2'x
2
2
&&
&&
&&
(3)
Visiblement des accélérations et donc des forces apparaissent un peu partout sauf dans la
direction z’ (parallèle à Ω
ΩΩ
Ω). Cette expression (4) n’est pas très intuitive et on aimerait
retrouver par exemple l’accélération centrifuge qui ne dépend que de la position par rapport à

Mécanique Physique (S2) 7
ème
partie – page 4
l’axe de rotation (ici l’origine). Peut-on éliminer le temps dans (4) et obtenir une expression
qui ne dépend que des positions et vitesses instantanées ?
On voit que la vitesse (3) peut s’écrire
**
:
u cos Ωt =
'
x
&
-
Ω
y’
- u sin
Ω
t =
'y
& + Ω x’ (5)
0 = z’
et si on substitue les termes en u cos Ωt et u sin Ωt dans (4) grâce à cette relation (5) on
obtient la relation cherchée valable pour tout t :
==Ω−Ω+
=Ω−Ω−
0'z
0'y'x2'y
0'x'y2'x
2
2
&&
&&&
&&&
(6)
Le troisième terme à gauche est familier et pas autre chose que l’accélération centripète - Ω
2
R
’ (
R
’ vecteur perpendiculaire à Ω
ΩΩ
Ω) déjà rencontrée. Le nouveau terme est le deuxième de
composantes
Ω+ Ω−
0
'x2
'y2
&
&
. Maintenant peut on écrire le résultat sous la forme compacte
vectorielle ? Si on dénote par
v
’ la vitesse de la particule dans le repère en rotation, ce terme
se ré-écrit vectoriellement
2
Ω
ΩΩ
Ω
×
v
'
puisque
Ω
ΩΩ
Ω
=
Ω
0
0
. Ce terme s’appelle
l’accélération de
Coriolis
. Ainsi l’expression (6) fait donc apparaître deux forces dans le repère en rotation si
on fait passer les deux termes
à droite
(pour une particule de masse m) :
m
a
’ =
321
43421
centrifuge
Force
2
Coriolis
deForce
'm'm2 Rv Ω+×− Ω
ΩΩ
Ω (7)
•
Dès qu’il existe un
mouvement
dans le repère en
rotation apparaît une force perpendiculaire à v’ et
sur la droite de v’ lorsque Ω
ΩΩ
Ω pointe vers le
lecteur. Elle est visiblement responsable de la
déviation à droite de la trajectoire alors que la
force centrifuge « écarte » la particule de
l’origine.
•
Si v’ parallèle à Ω
ΩΩ
Ω, la force est nulle.
•
Comme cette force est perpendiculaire à v, elle ne travaille pas.
**
Note : Comme u cos Ωt et - u sin Ωt sont les composantes de la vitesse inertielle v dans le repère Ox’y’, (5) se
réécrit vectoriellement :
V = V’ + Ω × r’
Ω
ΩΩ
Ω
m
v’
Force de Coriolis

Mécanique Physique (S2) 7
ème
partie – page 5
Toute cette « dérivation » a été faite pour une particule libre, non accélérée, dans un repère
inertiel xy. Que se passe-t-il si la particule est soumise à des forces F donc accélérée dans le
repère inertiel ? Comme l’expression (6) est instantanée, on voit qu’il y aura à droite un seul
terme supplémentaire l’accélération propre de la particule et (6) se réécrira vectoriellement :
''2'
2
RVaa Ω−×+= Ω
ΩΩ
Ω (8)
L’accélération dans le repère inertiel a causée par des forces F cause des accélérations
relatives a’ dues aux forces F mais dues aussi aux pseudo-forces de sorte que (7) se généralise
à :
ma’ = F – 2 Ω
ΩΩ
Ω × mv’ + m Ω
2
R’ (9)
Si on réécrit (9) en introduisant la gravité effective g
e
:
g
e
= g + Ω
2
R’
'm'm2'm
e
Fgva ++×−= Ω
ΩΩ
Ω (10)
F’ représentant les forces autres que le poids.
On voit sur (10) que la dynamique étudiée dans un référentiel en rotation fait intervenir
essentiellement ce nouveau terme de Coriolis qui semble compliquer le problème. D’un autre
côté on en voit pas bien comment étudier le mouvement d’objets sur la terre à partir de
référentiels inertiels extérieurs à la terre. Ce n’est pas pratique compte tenu des énormes
vitesses de rotation terrestre comparées aux vitesses
sur
la terre. Tout d’abord dans les
mouvements de la vie ordinaire, a’ (d’ordre U
2
/L si la vitesse d’une particule change de U sur
une longueur L) est beaucoup plus grande que l’accélération de Coriolis 2ΩU :
U
2
/L
2
Ω
U
=U
2
Ω
L
>>
1
U/2ΩL, nombre de Rossby (qui était un météorologiste du milieu du 20
ème
siècle). Pour des
mouvements atmosphériques qui ont des vitesses U ∼ 10 m s
-1
et des échelles L ∼ 1000 km
typiques des dépressions des latitudes tempérées U/2ΩL = 7 10
-2
: la force de Coriolis domine
les accélérations relatives à ces échelles. Par contraste calculez le nombre de Rossby pour
l’écoulement de votre lavabo et concluez sur l’importance de la rotation de la terre.
Quelques exemples :
(i)
Considérons un lac gelé au pôle Nord. On lance un palet de
Hockey sur la glace. Si on néglige le frottement, le poids est
équilibré par la réaction normale à la surface et donc la force
de Coriolis est la seule force horizontale. Comme elle est
perpendiculaire à la vitesse et à droite, elle est centripète si la
trajectoire s’effectue dans le sens des aiguilles d’une montre.
Donc v'
2
r
=2Ωv' dans la direction du centre de la trajectoire A alors que dans la
direction tangentielle
dt
'dv = 0. Ainsi v’ est constante et la trajectoire est un cercle de
Force de
Coriolis
A
v
’
 6
6
1
/
6
100%