Energies potentielle et mécanique

Moreggia PCSI 2011/2012
1
Chap.4 – Aspects énergétiques de la dynamique (Part. 2)
Energies potentielle et mécanique ; Stabilité d’un équilibre
1. Forces conservatives - Energie potentielle
1.1. Forces conservatives - Forces non conservatives
1.2. Définition de l’énergie potentielle du point M soumis à une force conservative
1.3. Une force conservative dérive d’une énergie potentielle
1.4. Energie potentielle de pesanteur
1.5. Energie potentielle élastique
1.6. Energie potentielle totale du système
1.7. Exemple : point matériel suspendu à un ressort vertical
2. Théorème de l’énergie mécanique
2.1. Interprétation physique de l’énergie potentielle
2.2. Définition de l’énergie mécanique du point M
2.3. Théorème de l’énergie mécanique
2.4. Système en évolution conservative - Intégrale première de l’énergie
2.5. Exemple : point matériel suspendu à un ressort vertical
2.6. Exemple : pendule simple
3. Evolution conservative : discussion graphique du mouvement
3.1. L’énergie mécanique est toujours supérieure à l’énergie potentielle
3.2. Discussion graphique de la nature du mouvement
3.3. Exemple : bille se déplaçant sur un sol accidenté (creux et bosses)
3.4. Exemple : point matériel suspendu à un ressort vertical
3.5. Exemple : mouvement d’un pendule à tige rigide
4. Positions d’équilibre du point M - Stabilité, instabilité
4.1. Extremum d’énergie potentielle : un critère d’équilibre du point M
4.2. Minimum ou maximum d’énergie potentielle : un critère de stabilité de l’équilibre
4.3. Retour sur les trois exemples
5. Portrait de phase : une nouvelle approche graphique du mouvement
5.1. Etat mécanique du point M : position et vitesse
5.2. Intérêt du portrait de phase
5.3. Propriétés du portrait de phase
5.4. Exemple : mouvement du pendule à tige rigide

Moreggia PCSI 2011/2012
2
Intro :
Au chapitre précédent, on a défini l’énergie cinétique d’un point matériel, la puissance et le travail d’une force.
Ces notions ont permis de reformuler la RFD en termes de transfert et de variation d’énergie (TPC et TEC). Cette
nouvelle formulation des lois de la mécanique est particulièrement utile dans les problèmes à un degré de liberté.
De manière générale, le travail d’une force (entre deux positions, entre deux instants) est une quantité qui dépend
du chemin suivi par le système. Certaines forces se distinguent pourtant des autres. Pour ces forces, dites
conservatives, le travail ne dépend pas du chemin suivi, mais seulement des positions initiale et finale du système.
Dans le cas très particulier des forces conservatives, on va introduire dans ce chapitre deux nouvelles grandeurs
énergétiques : l’énergie potentielle et l’énergie mécanique. Elles vont permettre d’établir un nouveau théorème :
le Théorème de l’Energie Mécanique. Equivalent au TEC, ce nouveau théorème permet de discuter encore plus
simplement la nature du mouvement.
A l’aide de ces nouveaux outils, on pourra discuter de la stabilité des positions d’équilibre accessibles au système.
On terminera par une nouvelle approche graphique du mouvement : le portrait de phase.
On a vu que l’application du TPC est particulièrement utile pour résoudre des problèmes à un degré de liberté.
Tout ce chapitre est limité aux problèmes où seule une coordonnée permet de repérer la position du point M.
1. Forces conservatives - Energie potentielle
1.1. Forces conservatives - Forces non conservatives
La question de savoir si une force est ou non conservative est importante. On remarquera que cette question n’a
un sens que si la force travaille. Les forces qui ne travaillent pas ne sont jamais impliquées dans les
raisonnements énergétiques. Quelques forces qui ne travaillent jamais :
o la réaction normale du support
o la tension d’un fil idéal
o (la force magnétique)
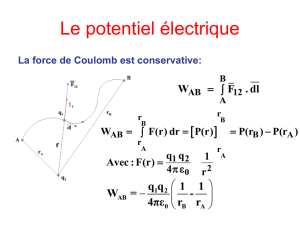
On a montré que le poids et la force de rappel élastique sont des forces conservatives. Dans un premier temps, en
exercice, on ne rencontrera que ces deux forces conservatives. Mais il en existe d’autres :
o la gravitation
o la force de Coulomb (entre particules chargées)
o les interactions nucléaires
A notre niveau, les forces non conservatives sont les forces de frottements (fluide et solide).
1.2. Définition de l’énergie potentielle du point M soumis à une force conservative
On rappelle que le travail est une quantité d’énergie reçue par le point M sous l’action d’une force. Sur un trajet
élémentaire, le travail élémentaire est une quantité élémentaire d’énergie reçue par le point M. On a lourdement
insisté au chapitre précédent sur la distinction entre :
o quantité d’énergie reçue par le point M (notations
W et W)
o et variation d’énergie du point M (notations dEc et
Ec)
On considère à présent un point matériel M soumis à une seule force, une force conservative. C’est un problème à
un degré de liberté, on suppose que la position du point est repérée par la coordonnée x (cela pourrait être ou ).
La force étant conservative, le travail entre deux positions M1 et M2 prises par le point M au cours de son
mouvement ne dépend que des positions M1 et M2. On peut alors considérer le travail d’une force conservative
comme la variation d’une fonction de la position : « f(x) ». Au signe près, cette fonction de la position définit
l’énergie potentielle.

Moreggia PCSI 2011/2012
3
On définit l’énergie potentielle Ep(x) du point M à partir de la relation suivante :
Sur un trajet élémentaire, la variation élémentaire de l’énergie potentielle du point M est égale à l’opposé du
travail élémentaire de la force conservative associée.
Remarques :
En intégrant sur un trajet fini, entre M1 et M2, on obtient la relation sous forme intégrale :
p
EW
21
avec
12 xExEE ppp
On notera que l’énergie potentielle étant définie à partir du travail, elle dépend du référentiel.
Ces relations ne sont généralement pas utiles en exo. On ne calcule pas le travail à partir de la variation
d’énergie potentielle, l’intérêt principale de l’énergie potentielle étant de ne plus s’embêter à calculer le
travail des forces conservatives. Quant à la définition, elle sert à démontrer les formules qui suivent.
1.3. Une force conservative dérive d’une énergie potentielle
Le but est ici d’établir une formule reliant directement l’énergie potentielle à la force associée. La formule
générale utilise l’opérateur « gradient », hors programme en ce début de sup. Pour les mouvements à un degré de
liberté, on peut heureusement s’en passer.
Les formules suivantes se démontrent à partir de la définition de l’énergie potentielle. Elles sont données dans les
cas où la position de M est repérée par une seule coordonnée (respectivement , ou , ou ).
Relation « force projeteé » - énergie potentielle
C’est pourquoi on dit d’une force conservative « qu’elle dérive d’une énergie potentielle ».
Méthode pour établir l’expression mathématique de
1. Définir un repère, et identifier la coordonnée « qui fait travailler » la force
2. Utiliser une des formules ci-dessus, et la primitiver
3. Déterminer la constante d’intégration en fixant arbitrairement un point de l’espace à
Cette dernière étape consiste à « définir l’origine de l’énergie potentielle »
Il apparaît donc clairement que l’énergie potentielle est une fonction de la position qui n’est définie qu’à une
constante près. Cette constante n’a aucune signification physique, et peut-être choisie arbitrairement.
On remarquera que l’énergie potentielle étant une fonction uniquement de la position, une force ne peut être
conservative que si c’est une fonction de la position uniquement. On comprend mieux ici pourquoi les forces de
frottements ne sont pas des forces conservatives.
1.4. Energie potentielle de pesanteur
Etablir l’expression de l’énergie potentielle de pesanteur en coordonnées cartésiennes.
On la retiendra par cœur, sans la redémontrer en exercice (sauf si explicitement demandé) :
mgzzEp
On retiendra aussi les conditions de validité de cette expression :
o z est la coordonnée qui repère la position du point M selon la verticale
o l’axe
z
e
du repère cartésien est dirigé vers le haut
o l’origine de l’énergie potentielle est fixée à l’origine du repère cartésien

Moreggia PCSI 2011/2012
4
1.5. Energie potentielle élastique
On retiendra l’expression de l’énergie potentielle en fonction de la longueur du ressort :
2
0
2
1 kEp
On partira toujours de cette formule pour exprimer ensuite l’énergie potentielle en fonction de la coordonnée de
position utilisée dans le problème.
On retiendra aussi que :
o Cette expression ne dépend pas du repère cartésien choisi (origine et direction des axes)
o Elle est valable pour une direction quelconque de l’axe du ressort (horizontal, vertical ou autre)
o Cette expression est établie en fixant l’énergie potentielle nulle quand l’allongement est nul
1.6. Energie potentielle totale du système
Le travail de la somme des forces étant égal à la somme des travaux de chaque force, il en est de même pour
l’énergie potentielle : l’énergie potentielle totale du point M est égale à la somme des énergies potentielles de
chacune des forces conservatives.
1.7. Exemple : point matériel suspendu à un ressort vertical
On considère un point matériel M suspendu à un ressort vertical dont une extrémité est fixée au plafond.
Choisir l’origine du repère de manière à simplifier les calculs qui suivent
Etablir l’expression de l’énergie potentielle totale du point M.
2. Théorème de l’énergie mécanique
2.1. Interprétation physique de l’énergie potentielle
Pour synthétiser ce que l’on sait sur les trois formes d’énergie que l’on a introduites jusqu’à présent (travail,
énergie cinétique et énergie potentielle), on fait une analogie avec une cuve remplie d’eau.
On retiendra que :
o Le point M peut emmagasiner de l’énergie sous deux formes : cinétique et potentielle
o On parle donc de l’énergie cinétique du point M, de l’énergie potentielle du point M
o Les forces conservatives ont pour effet de convertir l’énergie du point M d’une forme sous une autre
forme au cours du mouvement.
o On parle d’énergie « potentielle » car c’est une forme d’énergie qui peut être potentiellement convertie en
énergie cinétique sous l’action des forces conservatives.
2.2. Définition de l’énergie mécanique du point M
On définit l’énergie totale du point M, appelée énergie mécanique , comme la somme de l’énergie cinétique et
de l’énergie potentielle :
Les énergies cinétique et potentielle dépendent du référentiel, donc l’énergie mécanique dépend du référentiel.

Moreggia PCSI 2011/2012
5
2.3. Théorème de l’énergie mécanique
Le TEM (resp. TPM) découle directement du TEC (resp. TPC) et de la définition de l’énergie potentielle.
Théorème de l’énergie mécanique (forme instantanée)
Dans un référentiel galiléen, la variation par unité de temps de l’énergie mécanique du point M est égale à la
puissance des forces non conservatives :
Utilité : De la même manière que le TPC, le TPM permet d’obtenir l’équation différentielle du mouvement.
L’avantage du TPM est qu’il nous évite de calculer la puissance des forces conservatives, calcul remplacé par
celui des énergies potentielles associées (calcul plus simple, car des formules toutes prêtes).
Remarque :
On peut présenter le TPM sous une forme équivalente, inutile pour les calculs de sup, mais intéressante pour
l’interprétation physique en terme d’échange d’énergie. En introduisant les notations différentielles, on peut
écrire que :
La variation élémentaire de l’énergie mécanique du point M est égale au travail élémentaire des forces
non-conservatives reçu par le point M
pendant une durée élémentaire .
L’énergie fournie par les forces non conservatives, et reçue par le point M, est emmagasinée par le point M sous
forme mécanique.
Comme pour le TEC, on peut exprimer ce théorème sur une durée finie, un trajet fini :
Théorème de l’énergie mécanique (forme intégrée dans le temps)
Dans un référentiel galiléen, la variation de l’énergie mécanique du point M est égale au travail des forces
non conservatives :
Utilité : Sous cette forme intégrée dans le temps, le TEM n’apporte pas grand-chose par rapport au TEC. Il est par
contre très utile dans le cas des systèmes en évolution conservative.
2.4. Système en évolution conservative - Intégrale première de l’énergie
On dit qu’un point matériel M est en évolution conservative lorsqu’il n’est soumis qu’à des forces conservatives.
Dans ce cas, l’énergie mécanique du point M se conserve :
te
pcm CEEE
La constante est fixée par les conditions initiales.
Cette équation simple est une intégrale première du mouvement. On l’appelle aussi une intégrale première de
l’énergie. Expliquons ce que cela signifie.
L’énergie cinétique est fonction de la vitesse, et l’énergie potentielle est fonction de la position. Si l’on appelle x
la coordonnée qui permet de repérer la position du point M, « Em = Cte » est une équation différentielle du premier
ordre où n’apparaissent que
x
et
x
. Or cette relation a été démontrée à partir de la RFD, qui est une équation
différentielle du second ordre. On comprend donc que cette relation est issue de la RFD après avoir intégré une
fois par rapport au temps. D’où le nom d’intégrale première.
Il existe d’autres intégrales premières du mouvement. On appelle ainsi toute quantité qui est conservée au cours
du mouvement, et qui n’implique que la position et sa dérivée d’ordre un par rapport au temps.
 6
7
8
9
6
7
8
9
1
/
9
100%