Conception et optimisation d'un générateur piézoélectrique

Conception et optimisation d’un générateur piézoélectrique à déclenchement
thermomagnétique
Adrian RENDON, Skandar BASROUR
Laboratoire TIMA
46, Avenue Félix VIALLET
38031 Grenoble Cedex, France
E-mail : [email protected]
Résumé
Dans cet article nous décrivons la conception d’un
générateur piézoélectrique optimisé à travers ses
dimensions à l’aide d’un modèle en éléments finis. Le
système étudié est une structure constituée d’une poutre
encastrée-libre, munie de deux patchs piézoélectriques
collés sur ses deux faces longitudinales. Nous avons
modélisé ce dispositif en 3D sur ANSYS®, afin de le
caractériser en régime statique. Pour mettre en valeur
l’effet de ce procédé, une comparaison des
performances du générateur, avant et après
l’optimisation, est établie. L’apport de ce travail réside
dans l’approche du fonctionnement du générateur, par
déclenchement thermomagnétique, grâce à
l’hybridation piézo-magnétique, et dans la
méthodologie d’optimisation et de conception du
générateur. Nos résultats ont montré qu’en appliquant
cette technique d’optimisation, l’énergie produite par le
générateur augmente de 82% par rapport au
dimensionnement initial.
1. Introduction
Dans la dernière décennie, plusieurs travaux ont
démontré un intérêt concernant la possibilité de
récupérer de l’énergie thermique provenant des
changements temporels de la température ambiante [1].
Une façon commune de procéder consiste à utiliser la
transduction thermoélectrique directe à partir des
matériaux pyroélectriques. Par ailleurs, des études sur la
récupération de l'énergie vibratoire ont connu le succès,
préférant des structures munies d'une transduction
piézoélectrique. Les travaux de recherche portant sur la
modélisation du couplage électromécanique sont basés
sur la modélisation des géométries simples de
récupérateur, comme par exemple des poutres
multicouches à section transversale constante [2].
Cependant, peu d’études sont dédiées à la modélisation
d’une forme complexe et optimale de récupérateur, tel
qu’une poutre multicouches à section transversale
inégale, ce qui vise à augmenter l’énergie électrique
récupérée, tout cela grâce à l’optimisation des
dimensions du matériau piézoélectrique intégré au
mécanisme.
Les travaux de recherche de cet article étudient le
phénomène de récupération d’énergie thermique afin
d’élaborer un design optimal de générateur électrique à
transduction piézoélectrique. Le principe de
fonctionnement du générateur proposé est d’abord décrit
afin que le volume piézoélectrique soit intégré
adéquatement à une structure dynamique. Suite à cette
étude, une caractérisation analytique est adaptée à partir
des hypothèses d’Euler-Bernoulli pour les poutres en
flexion. Ensuite, ce modèle analytique est mis en valeur
à l’aide de MATLAB®. Des simulations en éléments
finis sont réalisées sous ANSYS® dans l’intention de
valider le modèle analytique et permettre ainsi de poser
le problème d’optimisation de la géométrie des patchs
piézoélectriques du générateur.
2.Principe d’opération du générateur
Il existe plusieurs sources d'énergie ambiante qui ont
déjà été examinées dans l’intérêt de la thématique de la
récupération de l’énergie, telles que les énergies solaire,
thermique, éolienne et vibratoire [3].
En ce qui concerne la récupération de l’énergie
thermique, un grand nombre de travaux ont été effectués
afin de réussir à convertir les pertes de chaleur d’un

système mécanique en électricité. La plupart des
chercheurs visent en réalité à extraire l’énergie d’une
différence spatiale de température; c’est-à-dire, la
différence qu’il existe entre deux zones, l’une qualifiée
de “froide” et l’autre de “chaude”. Parmi les méthodes
privilégiées pour cette approche, la plus commune est
l’usage de générateurs de tension thermoélectriques
exploitant l’effet Seebeck [4]. L’efficacité de ce genre
de générateur dépend à la fois du gradient de
température et de la composition des matériaux (à
travers leur coefficient Seebeck).
Quant à la récupération de l’énergie vibratoire, elle
est définie par un corps ayant un mouvement oscillatoire
autour d’une position d’équilibre résultant de l’énergie
cinétique. Ensuite, une architecture électromécanique
est destinée à transformer l’énergie cinétique en énergie
électrique. Pour ce faire, plusieurs technologies sont
disponibles, entre autres, électromagnétique,
électrostatique, magnétostrictive et piézoélectrique. La
technologie piézoélectrique a des nombreux avantages
par rapport aux autres technologies: elle est en mesure
de produire des tensions électriques élevées ce qui n’est
pas le cas de la technologie électromagnétique; elle n’a
pas besoin de source de tension externe contrairement à
la conversion électrostatique et, surtout elle permet une
miniaturisation du récupérateur ce qui est limitée avec la
technologie magnétostrictive.
Concernant la conversion des variations temporelles
de température en électricité, elle peut être réalisée de
manière directe, via les matériaux pyroélectriques, ou de
façon indirecte, par le biais d’un transducteur; nous
pouvons mentionner le cas de l’aimantation et sa
dépendance thermogène. L’un des principaux obstacles
à surmonter avec les techniques de conversion, directes
ou indirectes, est la dépendance temporelle de la
température. En effet, si l’on considère une variation de
température faible au cours du temps, comme par
exemple la variation thermique journalière, on sera
limité à quelques degrés sur plusieurs heures. Par
conséquent, les matériaux pyroélectriques ne semblent
pas être des solutions rentables, tel est le cas du sulfate
de triglycine (TGS) et du titanate de plomb (PbTiO3).
Pour cette raison, une solution différente est envisagée
afin de pouvoir s’affranchir d’une évolution lente de la
température.
Nous avons envisagé un générateur réagissant à
certains seuils thermiques à l’aide des matériaux
magnétiques doux, comme les alliages FeNi ou FeNiCr
pour n’en citer que quelques-uns, ce qui entraîne une
conversion thermomagnétique. Ensuite, le générateur
présente un mouvement mécanique brutal. Cette
dynamique est donc mise à profit pour solliciter des
éléments piézoélectriques intégrés au mécanisme,
favorisant ainsi une transformation électromécanique.
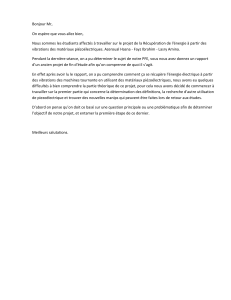
La Figure 1 illustre le schéma du générateur envisagé.
Entrefer
x
y
Lp
L
hp
xp
z
Récupérateur
de l'énergie
Système de
déclenchement
Figure 1. Schéma du générateur.
Le modèle est composé d’une poutre en acier en
porte-à-faux. Deux patchs piézoélectriques sont collés
aux faces longitudinales de la poutre. À l’extrémité libre
de la poutre, et au-dessous d’un entrefer, est placé un
circuit magnétique permanent de sorte que son champ
magnétique exerce une force axiale d’attraction sur le
matériau magnétique doux qui est fixé au bout de poutre
et vis à vis de la structure magnétique. En d’autres
termes, la poutre est excitée transversalement par son
extrémité libre à travers l’effort axial magnétique qui
fluctue au cours du temps selon la démagnétisation
thermogène, propriété intrinsèque du matériau
magnétique doux. De cette façon, les éléments
piézoélectriques sont déformés longitudinalement et
produisent une tension électrique.
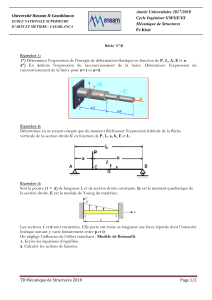
Parmi les différentes architectures électriques
simples disponibles, nous considérons une charge
résistive RL. Pour permettre de récupérer de l’énergie
dans la conversion électromécanique: d’une part parce
que la simplicité de cette configuration permet de
conserver un modèle linéaire et d’autre part car notre
intérêt dans cet article est d’optimiser la géométrie des
patchs piézoélectriques du récupérateur afin de
maximiser l’énergie dissipée à travers la résistance
lorsque la poutre est soumise à une déformation donnée.
Des différentes architectures électriques simples sont
illustrées sur la Figure 2.
VpRL
(a) (b)
Vp
RL
CL
(c)
RLL
L
Vp
Figure 2. Architectures électriques simples: (a) un circuit
R, (b) un circuit RC en série et (c) un circuit RL en
parallèle.
3.Modélisation analytique de la
structure
La modélisation de la poutre du récupérateur
d’énergie est basée sur les hypothèses suivantes:
• La transduction électromécanique du générateur
est réalisée par une poutre en porte-à-faux à
section transversale et munie de deux patchs
piézoélectriques qui sont exploités dans un mode
de couplage d31.

• La modélisation analytique du comportement de
la poutre réside dans les équations d’Euler-
Bernoulli pour des poutres en flexion.
Un modèle analytique, à constantes localisées et qui
dérive de l’analyse énergétique d’une structure comme
la notre, a été proposé [5]. Ce modèle est réalisé en deux
étapes, la première étape comprend la détermination des
raideurs en déformations planes de la poutre et des
patchs piézoélectriques. Dans la poutre, la contrainte et
la déformation longitudinale sont liées par
Tx=Y
1-
υ
2Sx=cBSx
(1)
Où Y est le module d’Young de la poutre et
υ
son
coefficient de Poisson, cB la raideur de la poutre en
déformation plane, et Sx la déformation suivant l’axe x.
Le champ électrique est identique dans tout le matériau
piézoélectrique, l’orientation suivant l’axe y et relié à la
tension Vp entre les électrodes. Si les éléments
piézoélectriques sont en circuit ouvert, la contrainte
longitudinale est reliée à la déformation longitudinale
par (2). cPE est défini comme la raideur en déformation
plane du matériau piézoélectrique en circuit fermée.
Tx=Sxx
E−Sxz
E2
Sxx
E
⎛
⎝
⎜⎞
⎠
⎟
−1
Sx=cPE Sx
(2)
Par ailleurs, en circuit ouvert, le déplacement
électrique Dy est nul et conséquemment la contrainte de
la structure liée à la déformation, suivant l’axe x, peut
être calculée par (3) où cPD est défini comme la raideur
en déformation plane du matériau piézoélectrique en
circuit ouvert. Les souplesses en circuit fermé sont
définies par
SE
xx
,
SE
xy
,
SE
xz
et
SE
yy
et la permittivité à
contrainte constante par
ε
yy
T
.
Tx=Sxx
E−Sxz
E2
Sxx
E−
dxy
21−Sxz
E
Sxx
E
⎛
⎝
⎜⎞
⎠
⎟
2
ε
T
yy −dxy
2
Sxx
E
⎛
⎝
⎜
⎜
⎜
⎜
⎜
⎞
⎠
⎟
⎟
⎟
⎟
⎟
−1
Sx=cPDSx
(3)
À propos de la deuxième étape de cette modélisation
analytique, elle s’adresse à étudier la déformée de la
structure. Dans cette optique, nous considérons son
premier mode de flexion lorsque les patchs
piézoélectriques sont en circuit ouvert. Comme
hypothèse de départ, nous supposons que cette déformée
est très proche de celle obtenue en appliquant une force
statique F à l’extrémité libre de la poutre, de telle
manière que l’équilibre de la structure mène à (4).
d2uy
dx2=F L −x
( )
ciIi
!avec
ciIi=cBIB!pour!x∈0, xP
⎡
⎣⎡
⎣∪xP+LP,L
⎤
⎦⎤
⎦
ciIi=cBIB+cPDIP!pour!x∈xP,xP+LP
⎡
⎣⎤
⎦
⎧
⎨
⎪
⎪
⎩
⎪
⎪
(4)
Où IB et IP représentent respectivement les moments
d’inertie, par rapport à la fibre neutre du système, de la
poutre et des patchs piézoélectriques, dont les valeurs
sont calculées par (5) et (6).
IB=1
12
wBh3
B
(5)
IP=21
12
wPh3
P−wPhP
hB+hP
2
⎛
⎝
⎜⎞
⎠
⎟
2
⎛
⎝
⎜
⎜
⎞
⎠
⎟
⎟
(6)
Où wB représente la largeur de la poutre et hB son
épaisseur tandis que wP et hP définissent respectivement
la largueur et l’épaisseur des patchs piézoélectriques.
La résolution de l’équation différentielle (4), en
appliquant des conditions aux limites pertinentes, donne
le système d’équations (6) dont les constantes A, B, C et
D sont décrites par (7).
uyx
( )
=Fx23L−x
( )
6cBIB
!pour!x∈0, xP
⎡
⎣⎡
⎣
uyx
( )
=Fx23L−x
( )
6cBIB+cPDIP
( )
+Ax +B!pour!xP,xP+LP
⎡
⎣⎤
⎦
uyx
( )
=Fx23L−x
( )
6cBIB
+Cx +D!pour!x∈xP+LP,L
⎤
⎦⎤
⎦
(6)
A=1
cBIB
−1
cBIB+cPD IP
⎛
⎝
⎜⎞
⎠
⎟FxP2L−xP
( )
2
B=1
cBIB
−1
cBIB+cPD IP
⎛
⎝
⎜⎞
⎠
⎟Fx2
P2xP−3L
( )
6
C=1
cBIB
−1
cBIB+cPD IP
⎛
⎝
⎜⎞
⎠
⎟FxP2L−xP
( )
−F xP+LP
( )
2L−xP−LP
( )
2
D=1
cBIB
−1
cBIB+cPD IP
⎛
⎝
⎜⎞
⎠
⎟Fx2
P2xP−3L
( )
−F xP+LP
( )
22xP+2LP−3L
( )
6
(7)
Où xP désigne l’origine des patchs piézoélectriques
selon la longueur de la poutre, LP la longueur des patchs
piézoélectriques et L la longueur de la poutre.
Les caractéristiques de la structure sont présentées
dans le Tableau 1.
Paramètre
Valeur
Unité
Poutre
Longueur L
180
mm
Épaisseur hB
2,05
mm
Module d’Young Y
210
GPa
Coefficient de poisson
υ
0.3
-
Densité
ρ
B
7500
kg·m-3
Coefficient d’amortissement
13.3
µs
Patchs piézoélectriques
Longueur Lp
40
mm
Largeur wp
90
mm
Épaisseur hp
300
µm
Localisation des patchs xp
14
mm
Coefficient Piézoélectrique dxy
-108
pC·N-1
Densité
ρ
p
8100
kg·m-3
Souplesse
SE
xx
,
SE
xy
,
SE
xz
,
SE
yy
10.66, -4.52, -3.34, 13.25
10-12·Pa-1
Permitivité à contrainte
ε
yy
T
10.17
nF·m-1
Tableau 1. Caractéristiques de la structure.
4.Modélisation de la structure en
éléments finis
Dans la perspective de le comparer avec le modèle
analytique décrit précédemment, un modèle en éléments
finis a été crée sous ANSYS® (version 16.0).
Concernant le coefficient d’amortissement, la
commande DMPRAT permet d’établir un coefficient
d’amortissement global. Dans l’idée d’une réponse plus
réaliste, nous avons choisi une modélisation en 3D. La
structure est maillée par des éléments tétraédriques. Les
patches piézoélectriques sont maillés et couplés électro-

mécaniquement à l’aide de 5886 éléments SOLID226
tandis que la poutre à travers 12445 éléments
SOLID186 dont les degrés de liberté sont les
déplacements suivant x et y. En vue d’encastrer la
structure à l’une de ses extrémités, les degrés de liberté
des nœuds correspondants ont été fixés à zéro. D’une
part, le potentiel électrique des nœuds de la surface
entre les patchs piézoélectriques et la poutre est fixé à
zéro pour modéliser la masse électrique. D’autre part, le
potentiel électrique est configuré pour être à la même
valeur à tous les nœuds des faces libres des patchs
piézoélectriques afin de simuler les électrodes du
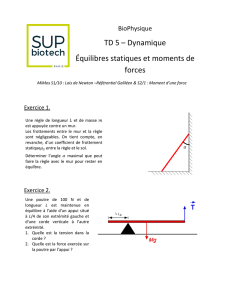
système. La Figure 3 représente le modèle 3D en
éléments finis de la structure du récupérateur.
Figure 3. Modèle 3D en éléments finis de la poutre.
En appliquant une force au bout de la poutre, dans
la direction -y et de magnitude calculée par (8) où v et g
sont définis respectivement comme le volume de la
poutre et la gravité, nous obtenons la déformation de la
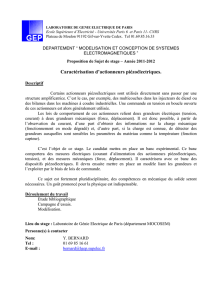
structure en régime statique. Les résultats des
déformations de la poutre issues du modèle analytique à
constantes localisées et de l’étude en éléments finis sont
ensuite comparés comme illustrés par la Figure 4.
F=1
20
ρ
Bvg
(8)
0 2 4 6 8 10 12 14 16 18
0
5
10
15
DEFORMATION DE LA POUTRE
Longueur de la poutre (mm)
Déformation de la poutre (m)
ANSYS
Portion #1
Portion #2
Portion #3
Figure 4. Comparaison des déformations de la poutre.
Il est évident que la tendance de courbature entre le
deux modèles est similaire, le déplacement en bout de
poutre est estimé à 14µm contre 13.39µm avec le
modèle analytique décrit par (6) et (7), soit une erreur
relative de 4.3%. Il est à noter que le modèle analytique
correspond bien au profil de courbure de la poutre.
Lorsque la poutre est sollicitée mécaniquement, une
tension électrique est générée par les patchs
piézoélectriques, ce qui permet d’estimer l’énergie
instantanée grâce à la capacité piézoélectrique CP, selon
(9).
E=1
2
CPVP
2=1
2
ε
0
ε
33wPLP
hP
V2
P
(9)
Du fait que le déplacement maximal de la poutre qui
est provoqué par la force axiale d’attraction magnétique,
produit un pic d’énergie, nous pouvons donc envisager
de maximiser cette énergie en optimisant les dimensions
des patchs piézoélectriques.
5.Optimisation en dimensions des
patchs piézoélectriques
Un problème d’optimisation fait intervenir des
paramètres que nous voulons garder constants, une
fonction objective que nous cherchons optimiser, des
variables d’état qui délimitent la conception, ainsi que
des variables de conception qui peuvent dans notre
étude évoluer. Nous visons à déterminer des dimensions
optimales pour l’épaisseur et la longueur des patchs
piézoélectriques afin de maximiser l’énergie dissipée à
travers les bornes piézoélectriques. En effet, si les
dimensions des patchs piézoélectriques changent, la
raideur globale du système sera aussi modifiée.
Cependant, le déplacement maximale en bout de poutre
ne doit pas diminuer car plus le déplacement est
important plus les éléments piézoélectriques génèrent de
l’énergie électrique. Le facteur limitant le processus
d’optimisation se manifeste dans la force d’attraction
nécessaire pour donner lieu à tel déplacement. À savoir
dans notre étude, elle apparaît comme la force de
réaction FRY à l’encastrement de la poutre lorsque cette
dernière est fléchie. La Figure 5 montre le processus
d’optimisation appliqué.
Variables de Design!
Résoudre le FEM pour la
force de réaction et
l’énergie produite!
Convergence?!
Mise à jour, Emax!
Affichage de
résultats à
chaque itération!
Données
d’entrée!
Fin!
Création du FEM!
Générer de nouvelles
variables!Extraction de résultats!
Non!
Oui!
Figure 5. Schéma de processus d’optimisation.
Certains paramètres du récupérateur demeureront
constants dans le processus d’optimisation. Tout
d’abord, les propriétés et les dimensions de la poutre
sont fixées, de la même manière que le largueur des
éléments piézoélectriques. Le Tableau 2 précise les
variables de design VD, les variables d’état VE et aussi
bien que la fonction objectif FO ainsi que leur valeurs
initiales.

Variable
Paramètre
Valeur
Unité
VD1
Longueur des patchs LP
40
mm
VD2
Épaisseur des patchs hP
300
µm
VE
Force de réaction FRY pour
uy_max = 200µm
3.4
N
FO
Énergie électrique selon (9)
5.2
µJ
Tableau 2. Variables initiales du générateur.
Le procédé d’optimisation est basé sur l’hypothèse
que le déplacement maximal au bout de la poutre uy_max
est constant et égale à 200µm, équivalent à 5.2µJ
d’énergie récupérée en considérant les dimensions
initiales. Les données d’entrée à l’algorithme
correspondent à celles listées par le Tableau 2. Pour la
gamme des valeurs pouvant être acceptées par la
variable d’état, nous avons considère 1 ≤ FRY ≤ 9
Newtons, avec une tolérance de 4mN. Concernant la
gamme des valeurs acceptables pour les dimensions des
patchs piézoélectriques, nous avons défini pour la
longueur 30 ≤ LP ≤ 150 mm, avec une tolérance de
60µm et pour l’épaisseur 300 ≤ hP ≤ 1500 µm, avec
60nm comme tolérance.
La méthode d'optimisation a été réalisée à l’aide du
modèle 3D en éléments finis sous ANSYS®. Parmi les
deux algorithmes d’optimisation disponibles sur ce
logiciel, nous avons utilisé la méthode d’ordre zéro
avancée: “Sub-Problem Approximation” pour ne pas
avoir de temps de calcul prohibitif car ce module est le
plus rapide. L’algorithme est basé sur les
approximations par des moyens de moindres carrés. La
convergence du processus d’optimisation est atteinte à
la fin de 13 itérations, fournissant le design optimal à la
huitième itération. Les valeurs optimales du
récupérateur déterminées par l’algorithme figurent sur
Tableau 3.
Variable
Paramètre
Valeur
Unité
VD1
Longueur des patchs LP
98.6
mm
VD2
Épaisseur des patchs hP
796.2
µm
VE
Force de réaction FRY
pour uy_max = 200µm
5.5
N
FO
Énergie électrique selon
(9)
9.8
µJ
Tableau 3. Variables optimisées du générateur.
Nous constatons que l’algorithme a convergé vers
une solution maximale d’énergie tout en respectant les
gammes des valeurs acceptées pour les variables de
conception. Afin de bien comprendre ce qui a mené
l’algorithme d’optimisation, une comparaison est faite
avec le récupérateur aux dimensions initiales. Le
récupérateur aux dimensions optimisées dissipe une
énergie électrique de 9.8µJ avec un déplacement
maximal de 200µm. La Figure 6 montre l’évolution de
l’énergie, ainsi que celle de la force, pendant les
itérations de l’algorithme d’optimisation. Le progrès des
dimensions des éléments piézoélectriques et la force de
réaction à l’encastrement de la poutre, sont
respectivement montrés dans la Figure 7. À titre
indicatif, le modèle 3D de la poutre avec les nouvelles
dimensions issues de l’optimisation est montré sur la
Figure 8.
Figure 6. Évolution de l’énergie et la force de réaction
pendant le processus d’optimisation.
Figure 7. Évolution de la longueur des patchs
piézoélectriques pendant le processus d’optimisation.
Vue de dessus
Vue de face avec zoom
Figure 8. Modèle 3D optimisé de la poutre.
6.Conclusion
Dans cet article, une comparaison entre une
modélisation analytique et une étude en éléments finis
pour un générateur piézoélectrique à déclenchement
thermomagnétique a été effectuée. En outre, une
méthode d’optimisation, pour les dimensions des patchs
piézoélectriques, a été appliquée afin de maximiser le
pic d’énergie maximale généré par le dispositif en
régime statique. Les résultats montrent une concordance
relative de 95.7% entre les modélisations analytique et
en éléments finis. Concernant la maximisation
 6
6
1
/
6
100%